

Pacotes tecnológicos de robótica guiada por visão - LHRobotics.Vision
De olho nos detalhes
O pacote de tecnologia
O pacote de tecnologia inclui o software LHRobotics.Vision, que permite a identificação e seleção precisa de objetos, além da remoção de peças sem colisões. Opcionalmente, o software também pode realizar o planejamento da trajetória do robô até o ponto de acomodação final. Para a aplicação, é necessário um sistema de visão baseado em projetores.
Sistemas de visão baseados em projetores com diferentes versões de campo de visão para cada caso de aplicação

Software
Licença básica
A licença básica, mais econômica, abrange a coleta das peças e sua remoção sem colisões. Esta versão é ideal para aplicações em que a posição final de depósito e o planejamento da trajetória correspondente não precisam ser gerenciados pelo software LHRobotics.Vision. A verificação de colisões se limita ao modelo da garra, enquanto o contorno de interferência do robô não é considerado nesta versão. Dessa forma, essa versão é particularmente adequada para caixas rasas ou garras grandes que precisam efetivamente entrar na caixa.
A licença básica permite que o LHRobotics.Vision seja operado em uma versão simplificada. As seguintes funções não estão incluídas na licença básica:
- Criação de posições para depósito de peças e, consequentemente, o planejamento da trajetórias
- Inserindo obstáculos
- Inserindo um modelo de robô
Licença Pro
A Licença Pro disponibiliza a totalidade das funcionalidades do software LHRobotics.Vision. Além dos recursos da Licença Básica, estão disponíveis as seguintes funcionalidades adicionais:
- Criação de um modelo de robô para verificação de colisões
- Criação de posições intermediárias e final do produto
- Planejamento da trajetória até o posicionamento final do produto
- Inclusão de todo o ambiente da célula para verificação de colisões durante o planejamento da trajetória
Essa versão é especialmente adequada para aplicações em que o posicionamento finaldas peças retiradas é crucial para o fluxo do processo.
Software Inteligente de Bin Picking
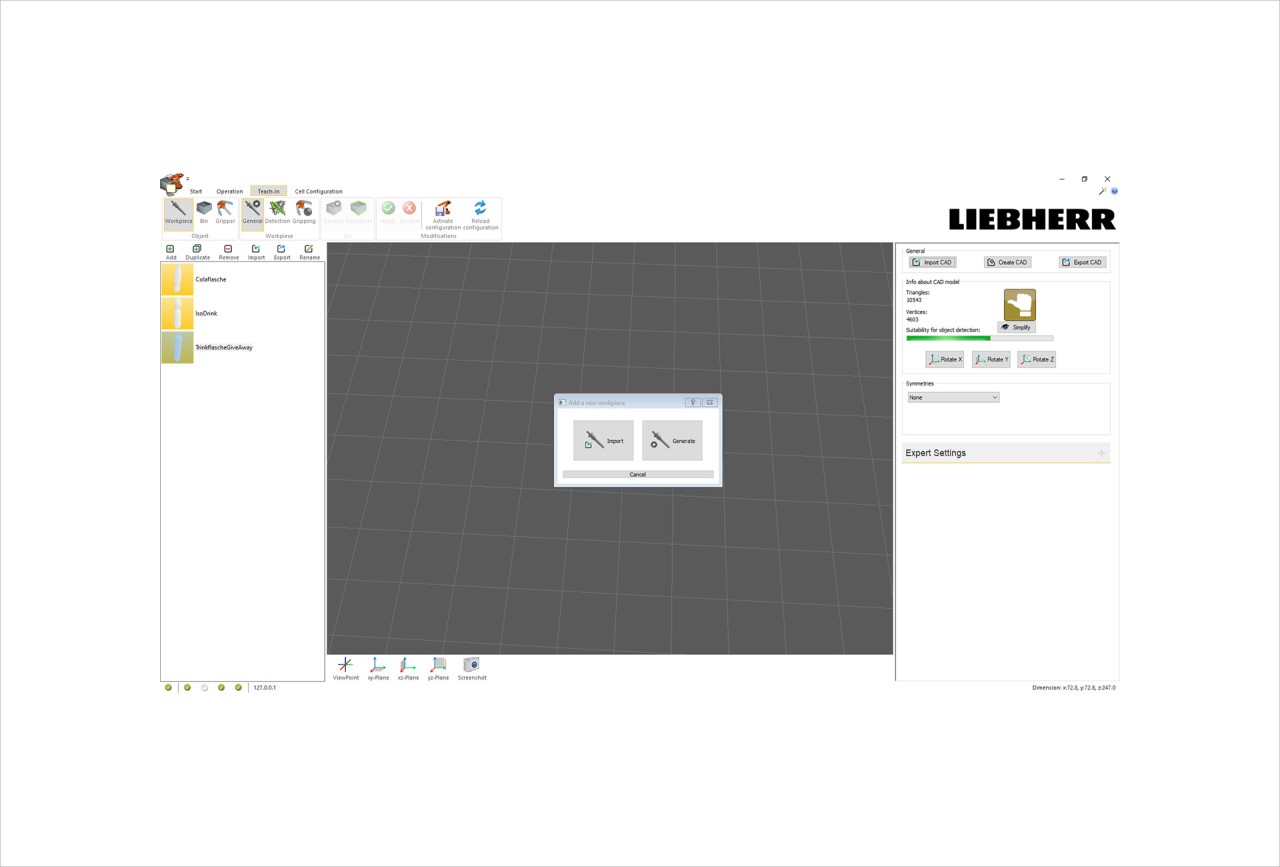
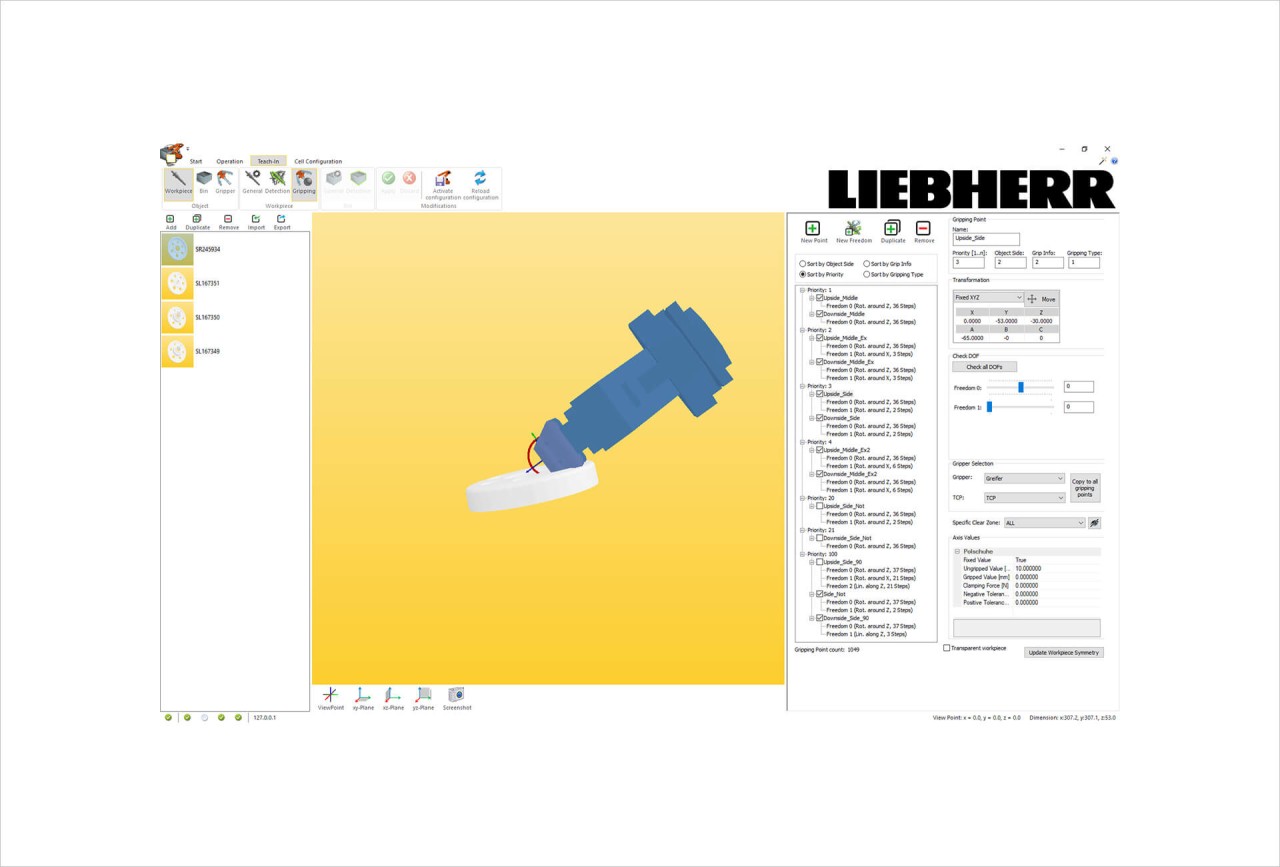
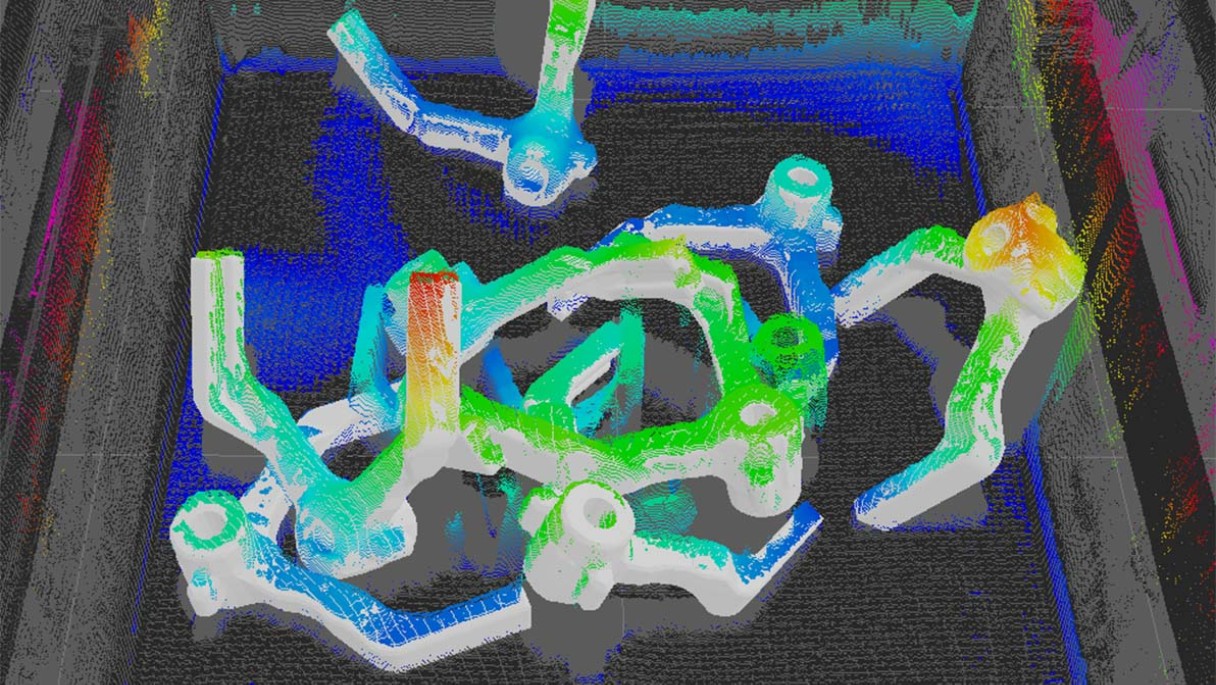
Passo a passo para um ajuste ideal
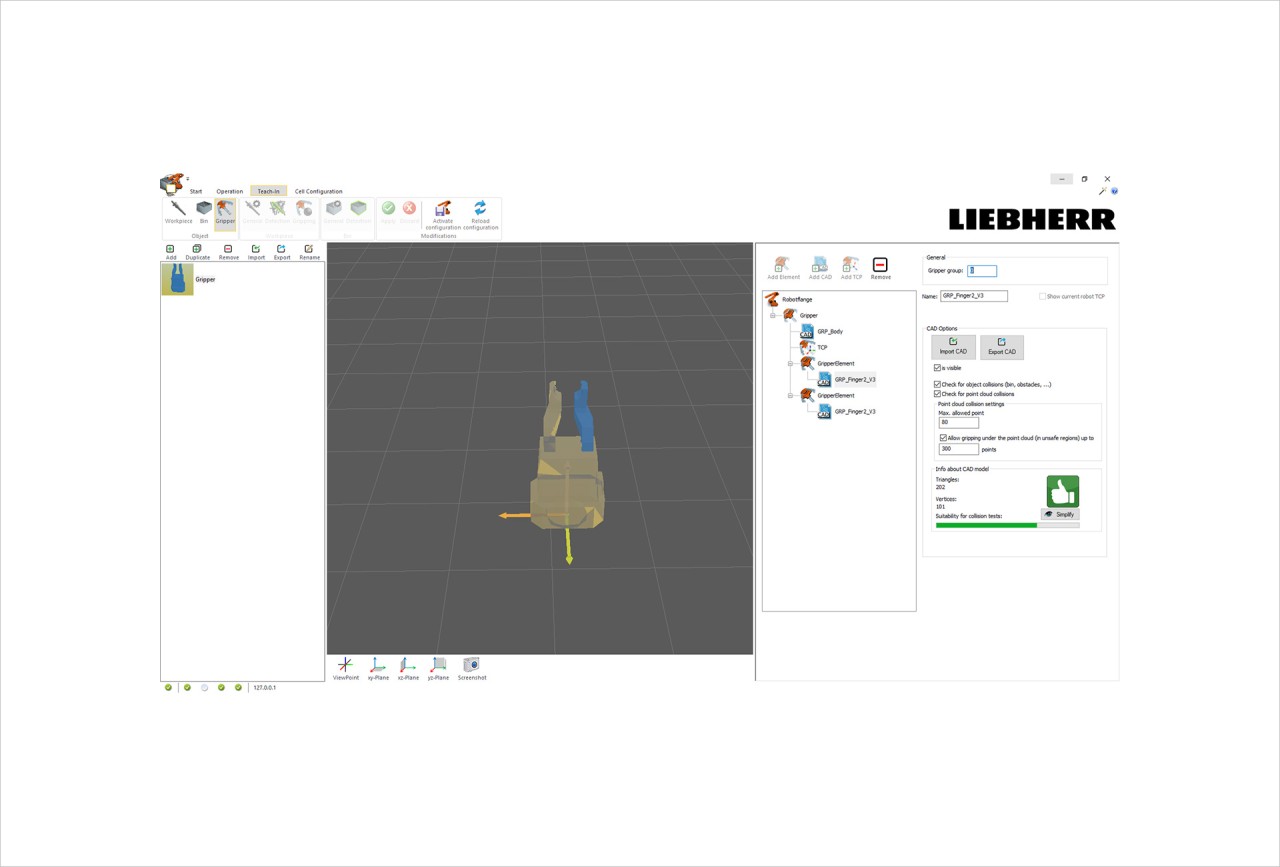
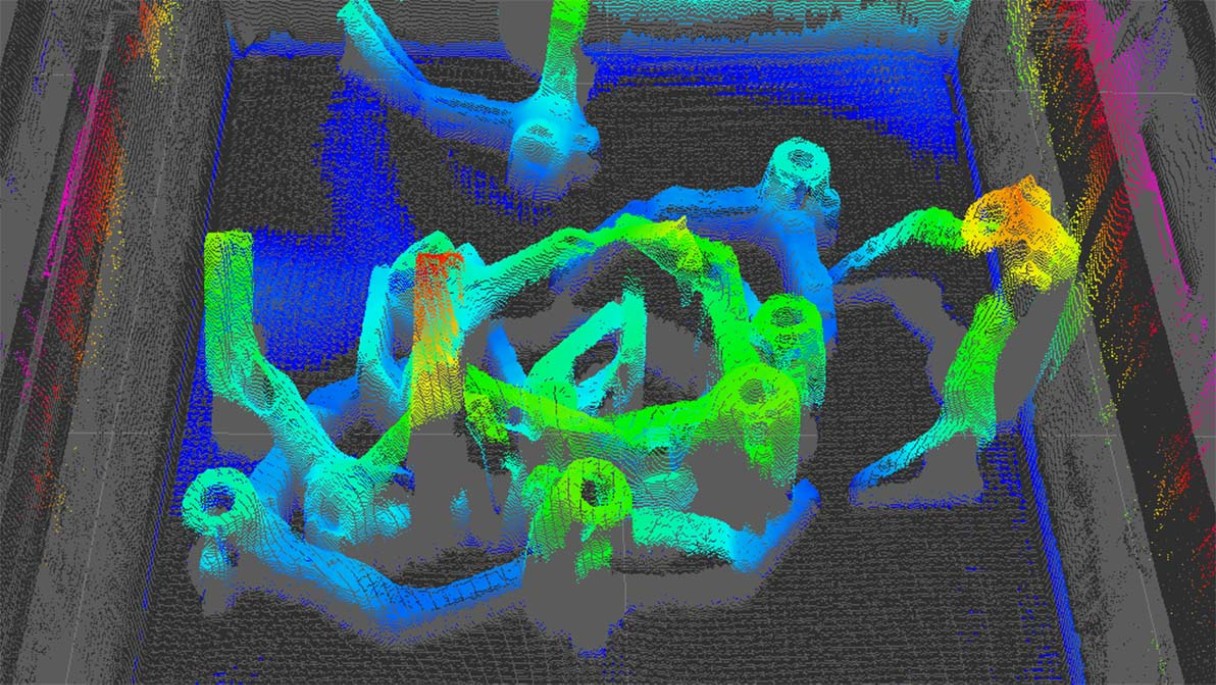
Fusão da garra com a peça
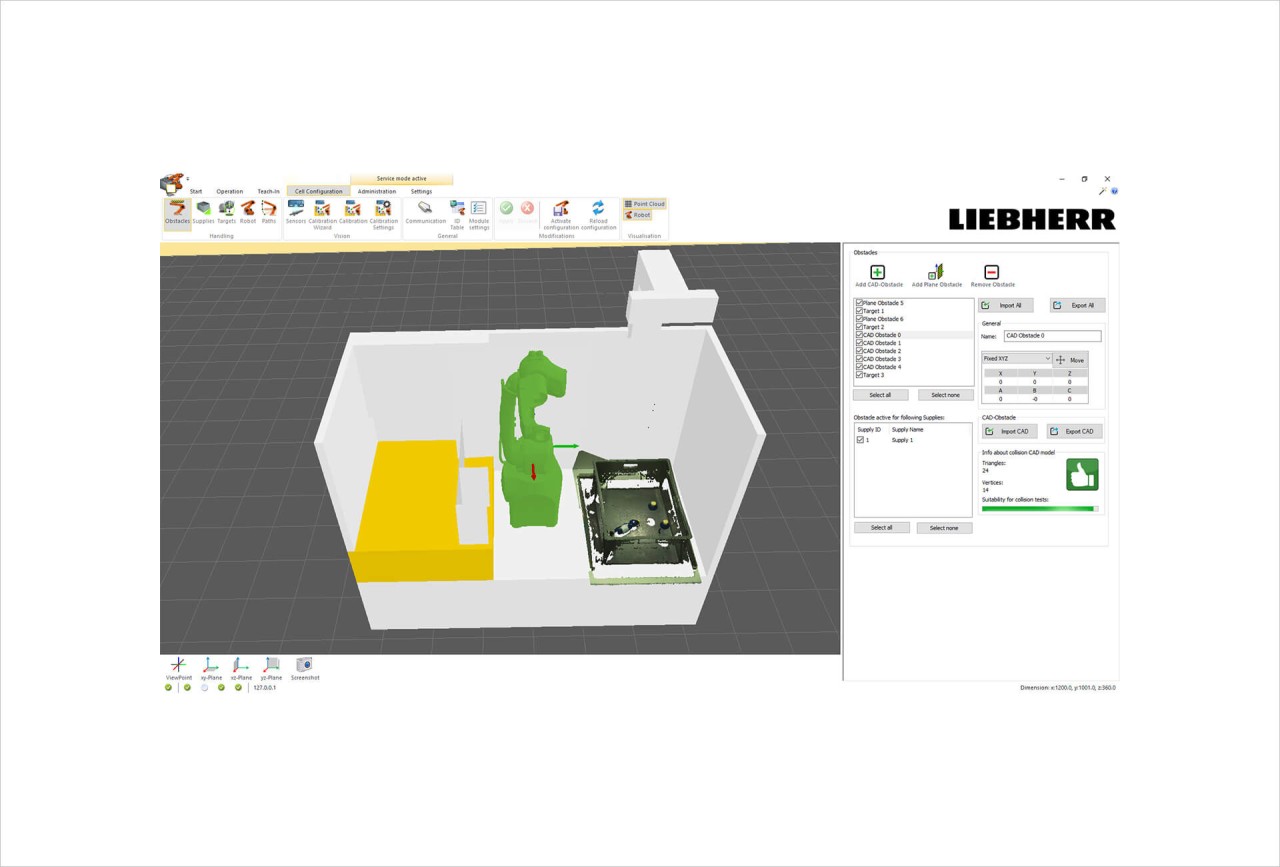
Monitoramento do ambiente
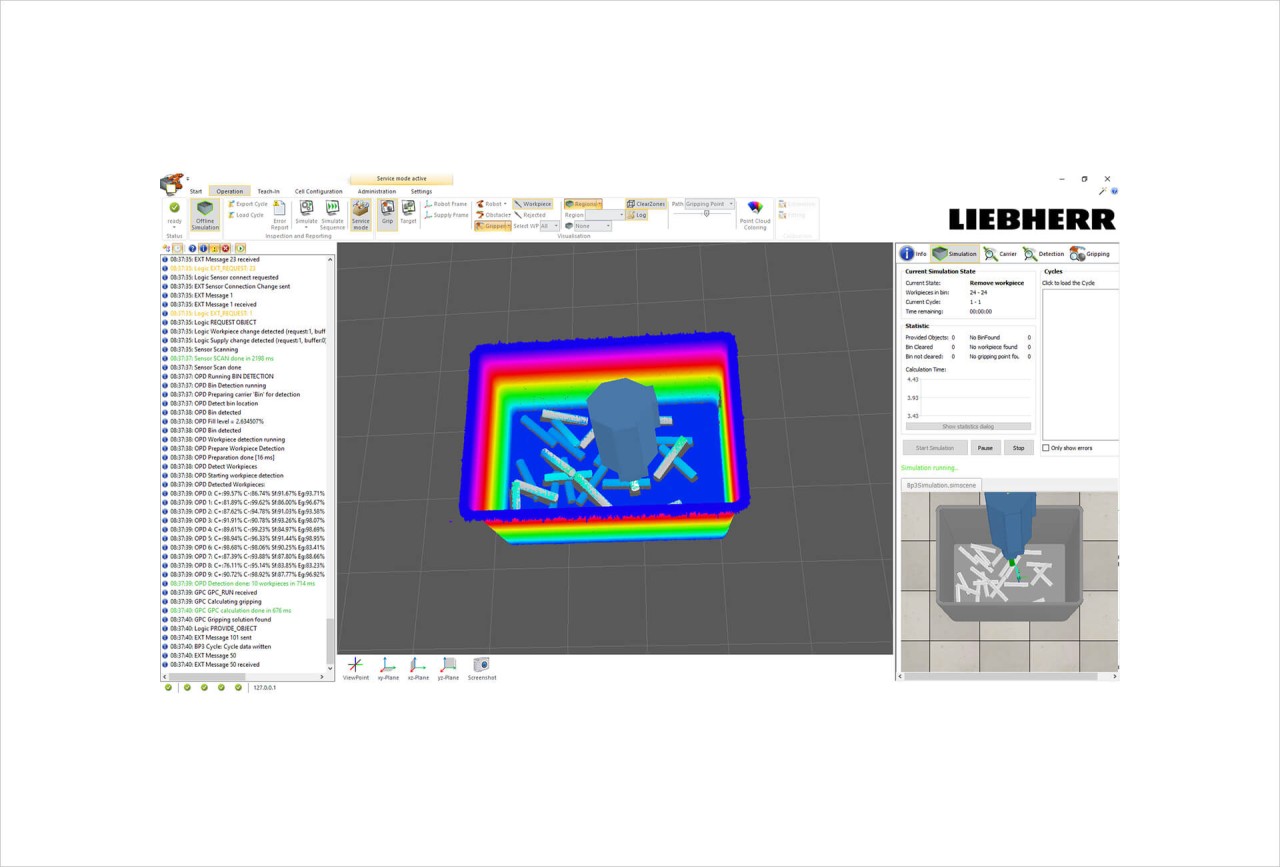
Possibilidades de simulação integradas com LHRobotics.Vision Sim
A inteligência artificial resolve as dúvidas
A partir da versão 3.4, a otimização dos parâmetros de reconhecimento é suportada por inteligência artificial.
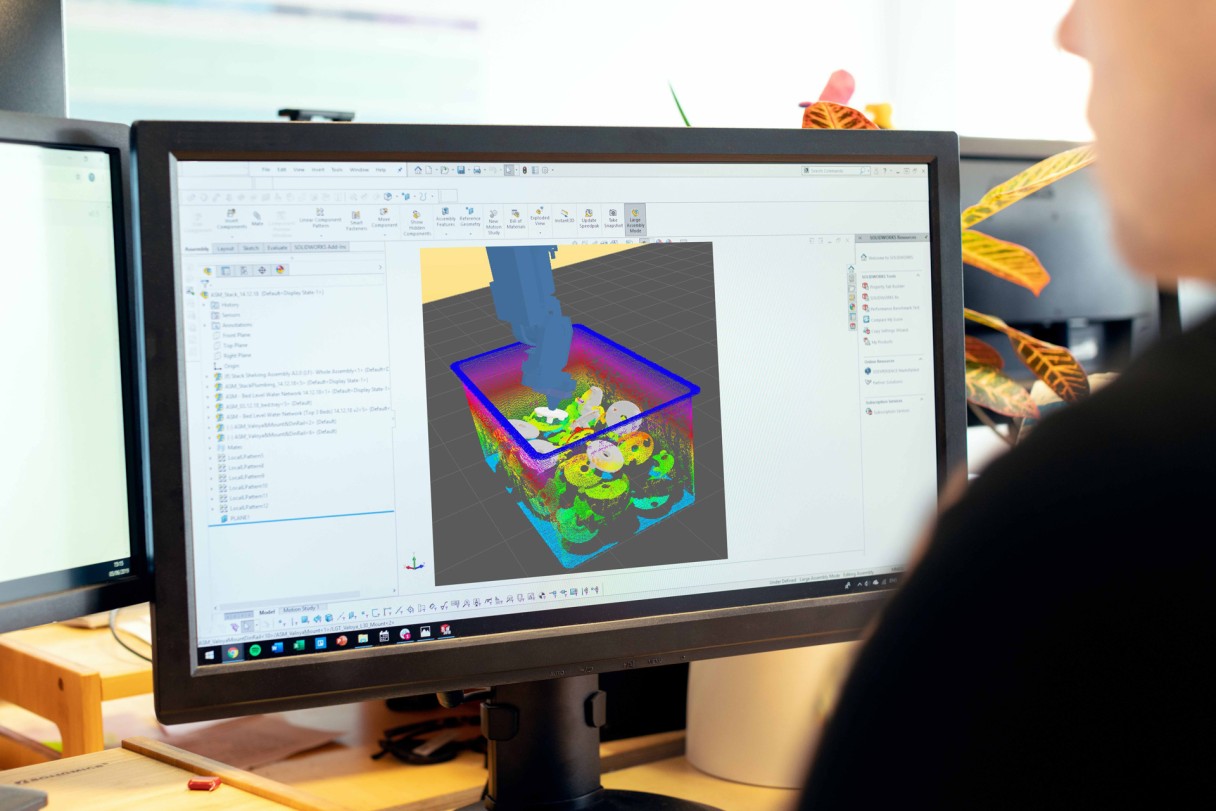
O operador cria uma nuvem de pontos e a classifica, posicionando manualmente as peças reais dentro dessa nuvem. Isso informa ao software em quais áreas específicas deve procurar as peças. Em seguida, o software realiza automaticamente várias varreduras e ajusta os parâmetros de reconhecimento de forma autônoma. Em várias interações, o software determina as configurações ideais para o reconhecimento das peças.
Otimização do reconhecimento de peças por segmentação de nuvem de pontos suportada por IA
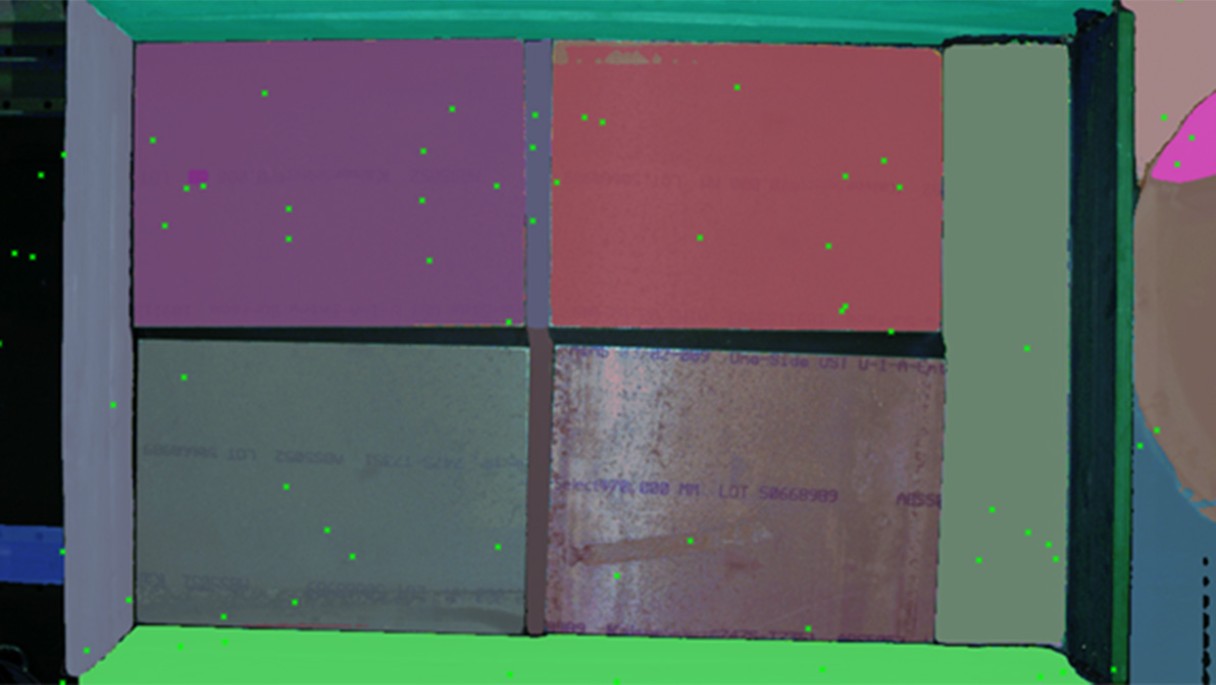
Para reconhecer as peças de forma mais rápida e precisa, a Liebherr também utiliza suporte de IA na segmentação da nuvem de pontos. Antes de comparar as peças com a nuvem de pontos, esta é dividida em subsegmentos com o auxílio da IA. Em seguida, o software LHRobotics.Vision procura as peças apenas nas áreas definidas. Segmentos que não correspondem às peças, como as paredes e o fundo da caixa, são removidos e ignorados na nuvem de pontos.

A câmera ideal para cada aplicação

Posicionamento ideal para capturas detalhadas: Aplicação com sensor na garra

Sensor com visão abrangente
Liebherr - LHRobotics.Vision - Como implementar o Bin Picking em 4 etapas
Este vídeo é fornecido pelo Google*. Se você carregar este vídeo, os seus dados, incluindo o seu endereço IP, serão transmitidos ao Google e podem ser armazenados e processados pelo Google para os seus próprios fins, fora da UE ou do EEE e, portanto, em outro país terceiro, particularmente nos EUA**. Não temos qualquer influência sobre como o Google tratará os dados posteriormente
Ao clicar em “ACEITAR”, você concorda em transmitir este vídeo para o Google, em conformidade com o artigo 6º, § 1, do RGPD. Se você não quiser dar o seu consentimento a cada vídeo do YouTube individualmente e quiser carregar os vídeos sem este bloqueador, você também pode selecionar “Aceitar sempre vídeos do YouTube” e, assim, dar o seu consentimento para as respectivas transmissões de dados associadas para o Google para todos os outros vídeos do YouTube que você acessar em nosso site futuramente..
Você pode revogar os consentimentos dados a qualquer momento com efeitos futuros e, assim, impedir a transmissão posterior dos seus dados ao anular a seleção do respectivo serviço em “Outros serviços (opcional)” nas configurações (posteriormente também acessível em “Configurações de proteção de dados” no rodapé do nosso site).
Para mais informações, consulte a nossa Política de privacidade e a Política de privacidade do Google.*Google Ireland Limited, Gordon House, Barrow Street, Dublin 4, Irlanda; matriz: Google LLC, 1600 Amphitheatre Parkway, Mountain View, CA 94043, EUA** Nota: A transferência de dados para os EUA associada à transmissão de dados para o Google ocorre com base na decisão de adequação da Comissão Europeia de 10 de julho de 2023 (Estrutura de Privacidade de Dados UE-EUA).Seu contato para pacotes de tecnologia de visão robótica
Teremos todo o prazer em responder às suas perguntas sobre aplicações de visão robótica.
Jürgen Groß
Gerente de vendas de células e sistemas flexíveis de produção, sistemas de automação e mobilidade elétrica
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
Alemanha
Tel.: +49 170 950 09 89
E-mail
Mais informações sobre nossos sistemas de visão
Leia artigos incríveis em nossas revistas para clientes e comunicados para a imprensa.



