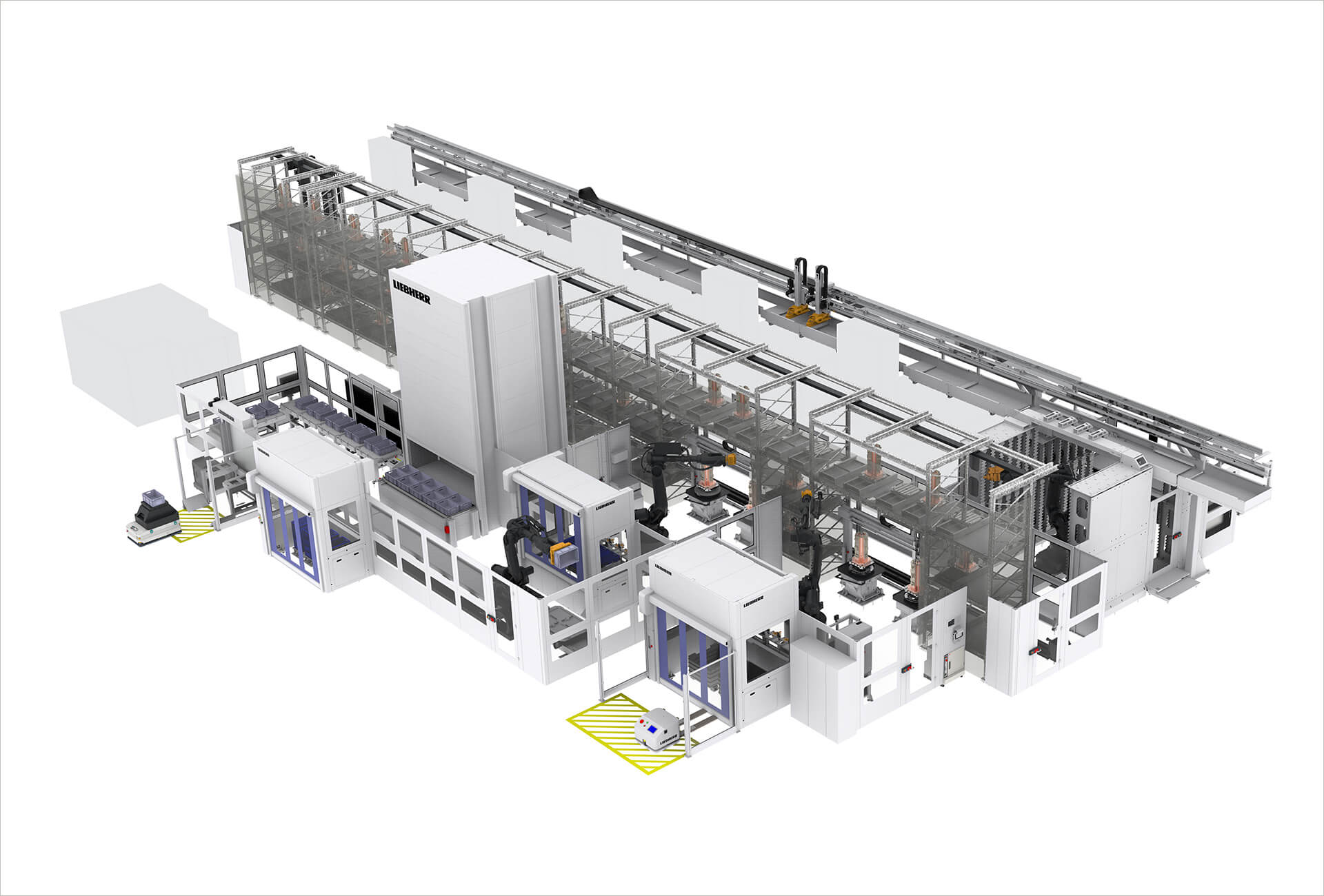
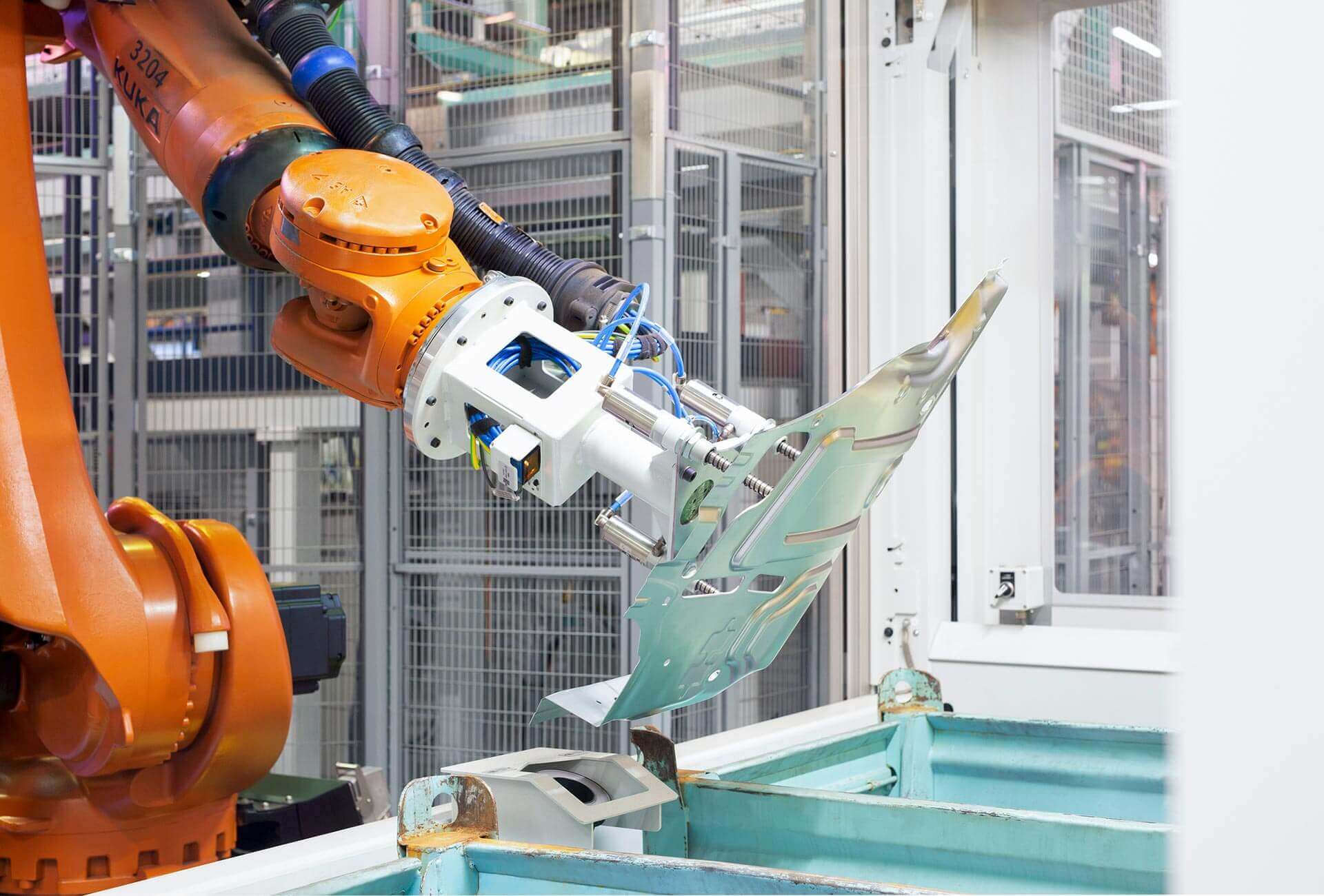




Alimentazione automatizzata delle lamiere di carrozzeria
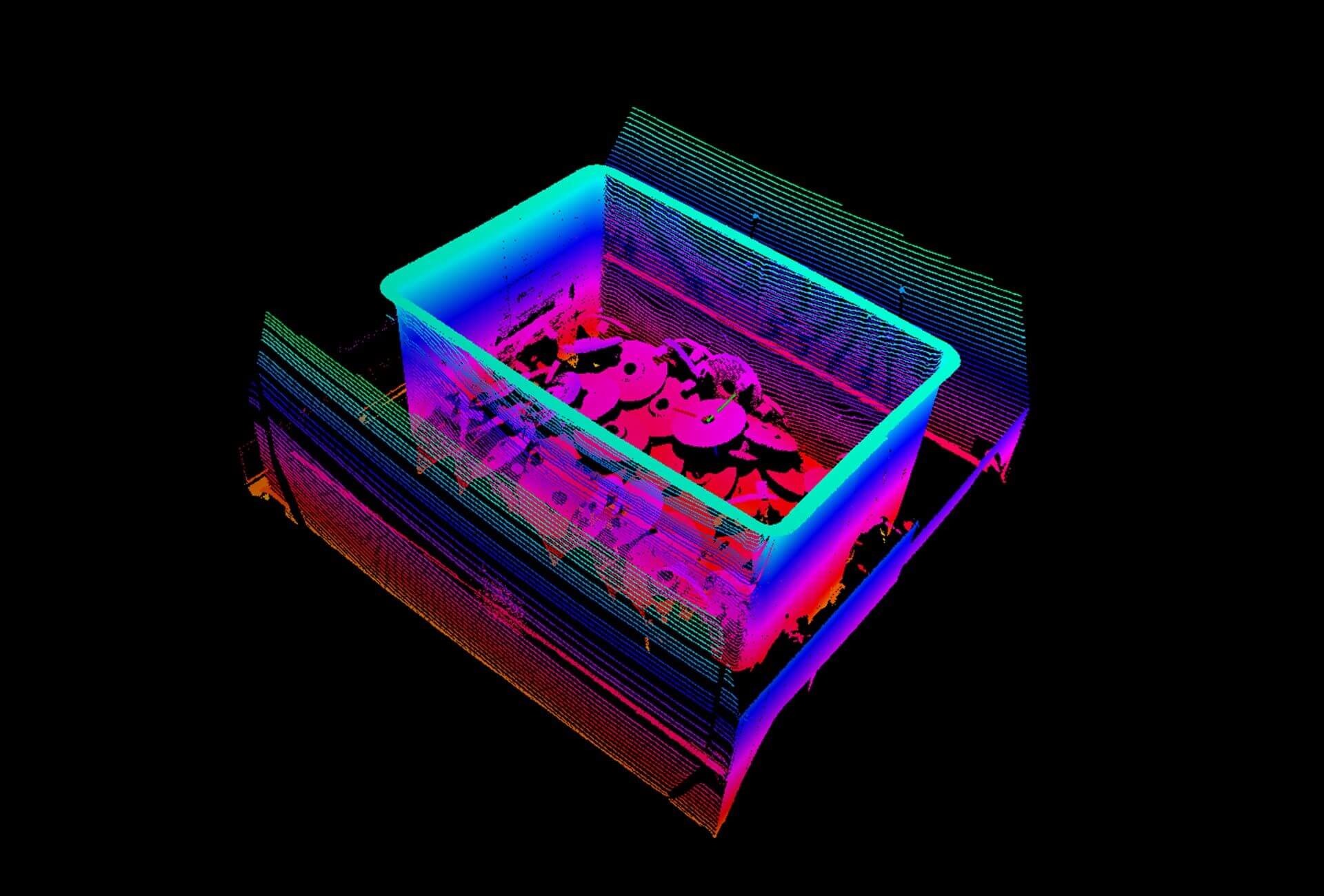
Le lamiere per il telaio laterale di un’auto arrivano tramite un treno rimorchiatore al modulo di alimentazione in grandi casse di metallo. Qui, il sistema di visione 3D esegue una prima scansione della posizione della cassa dall’alto e della posizione esatta delle lamiere di carrozzeria nella cassa. Sulla base di questa scansione, il robot rimuove la lamiera dalla cassa con una ventosa flessibile a tre punti e la invia a una telecamera 2D. Questa controlla la posizione dei componenti e rileva se due componenti sono stati afferrati contemporaneamente.
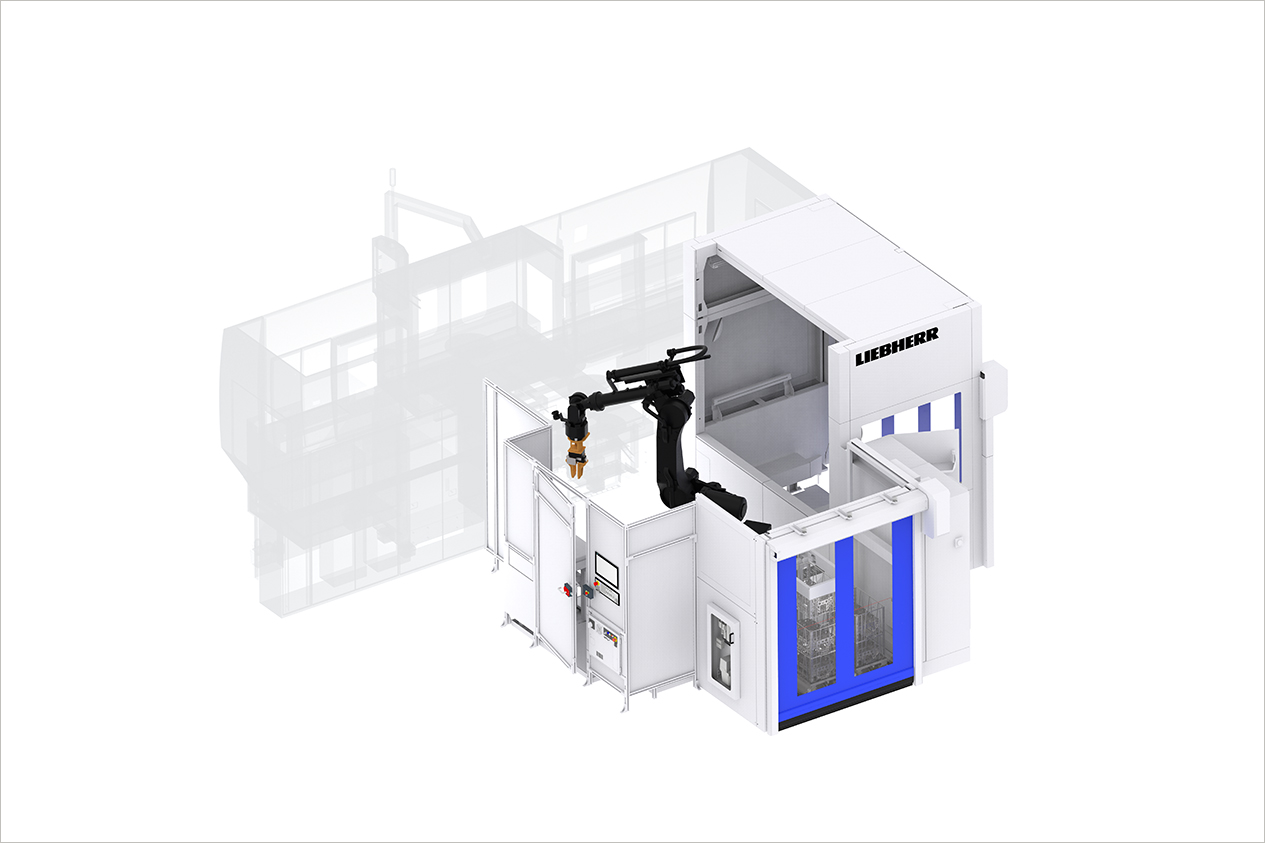
Caricamento del tornio e separazione in cestelli in rete metallica
Le ruote dentate grezze in casse vengono scaricate nel modulo di alimentazione con un carrello elevatore. Dopo la scansione con telecamera del materiale sfuso, i pezzi vengono separati con una pinza magnetica e collocati su una stazione di orientamento. Il robot passa quindi a una pinza parallela per prelevare il pezzo, riorientarlo e consegnarlo al tornio per la lavorazione. Dopo la lavorazione, i pezzi vengono caricati nei cestelli metallici di una cella di impilamento e le pile di cestelli pieni possono essere rimosse dall’operatore.
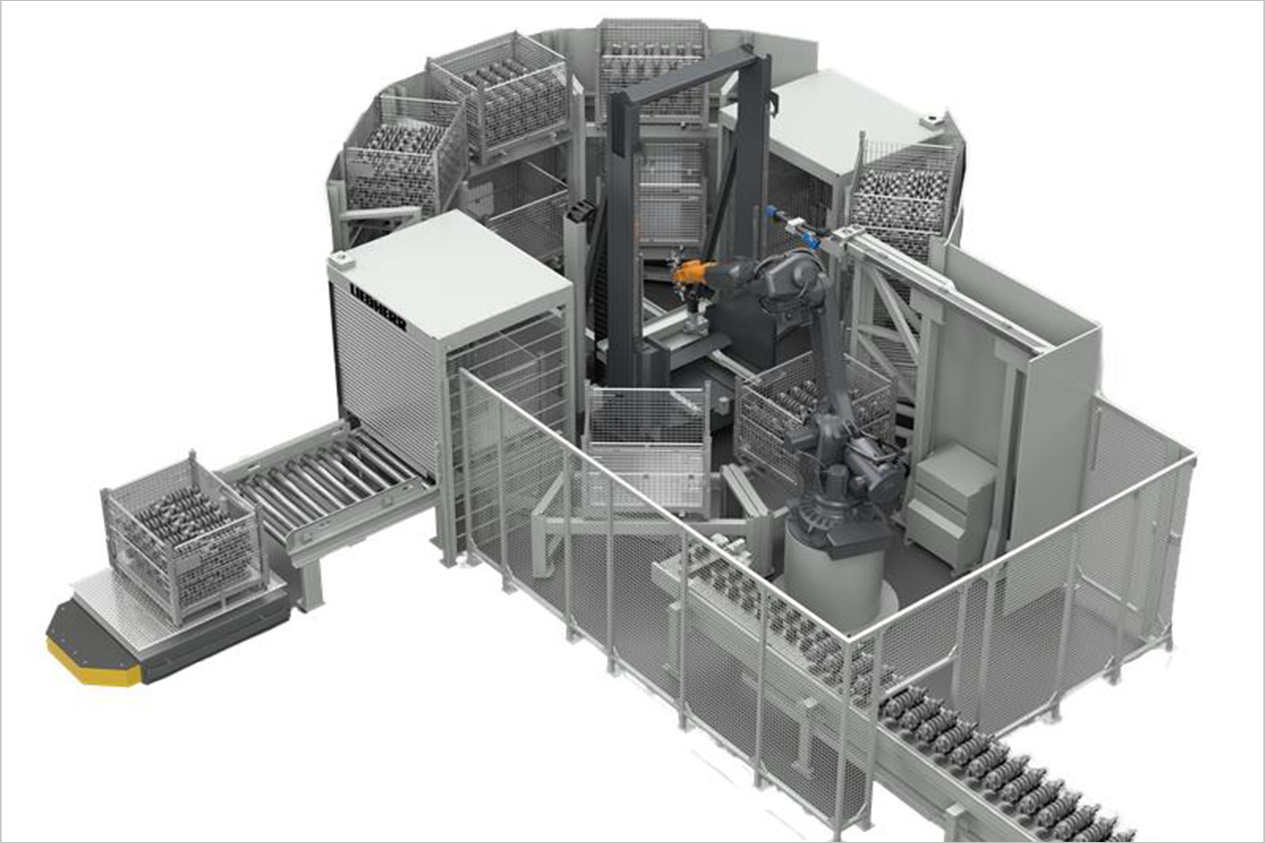
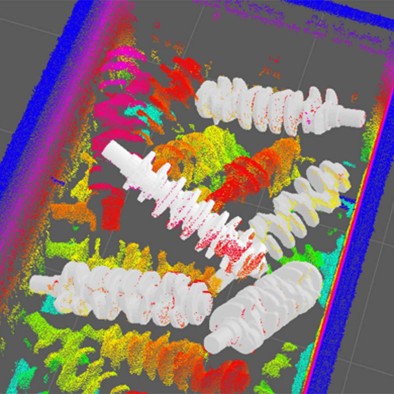
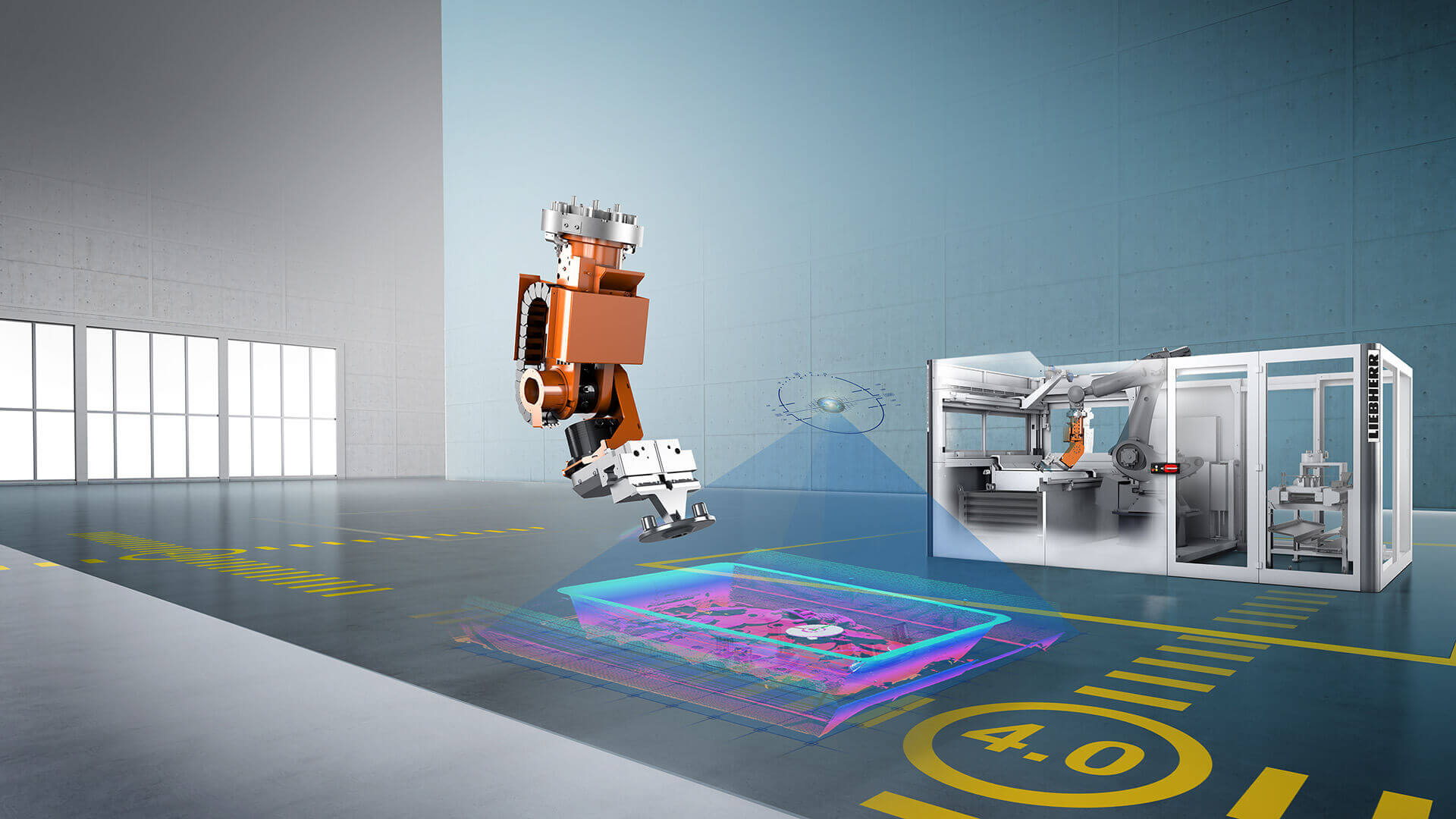
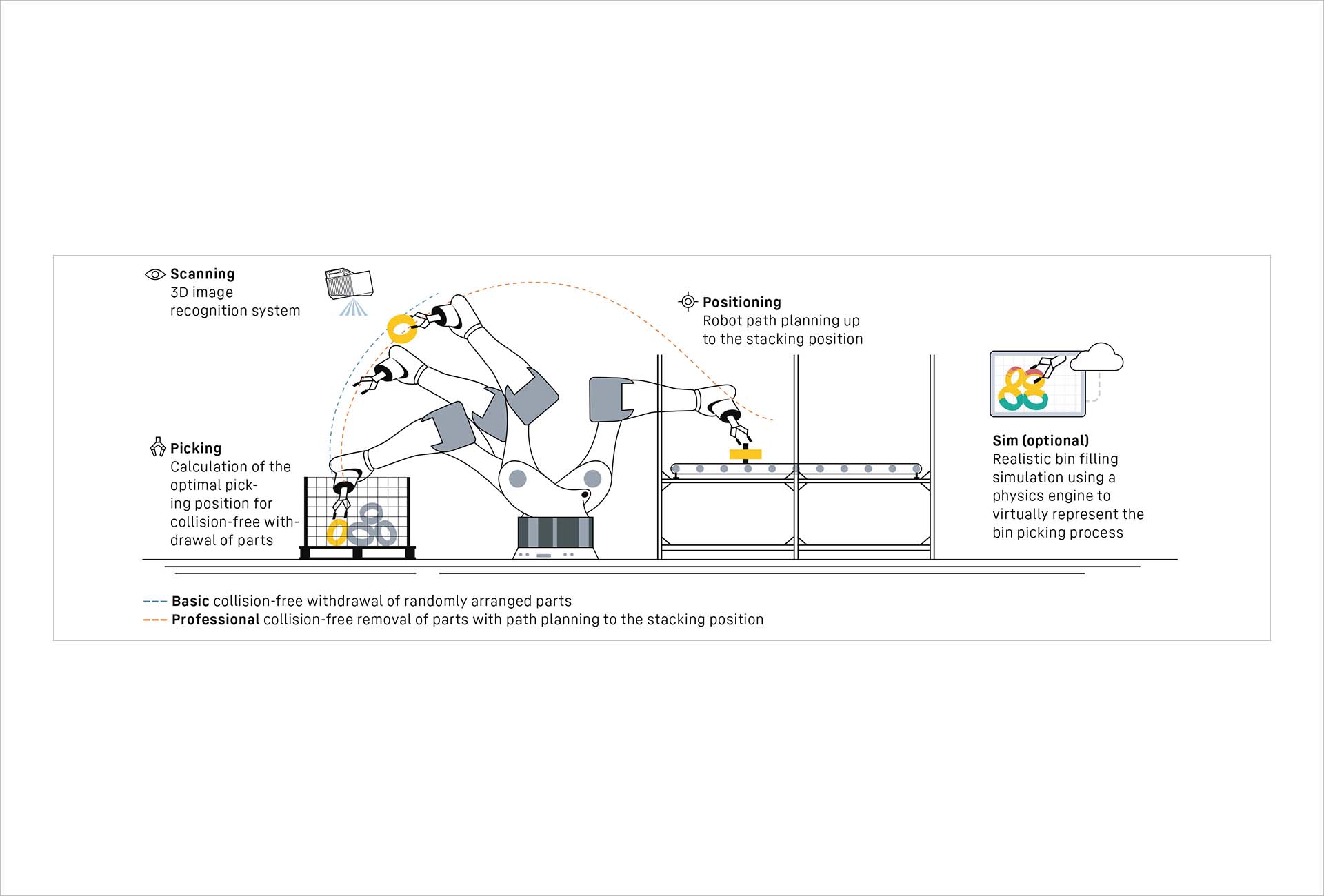
Ingresso della linea con magazzino tampone per alberi a motore
La combinazione del sistema di carico di rotazione (RLS) Liebherr e dell’applicazione di Bin Picking ha creato un ingresso della linea altamente flessibile. I pezzi grezzi degli alberi a motore sono stoccati in modo disordinato in casse a griglia e vengono consegnati all’ingresso della linea per mezzo di un sistema di trasporto senza conducente (AGV). Il computer host del cliente controlla le specifiche del numero di pezzi dei diversi tipi di componenti.