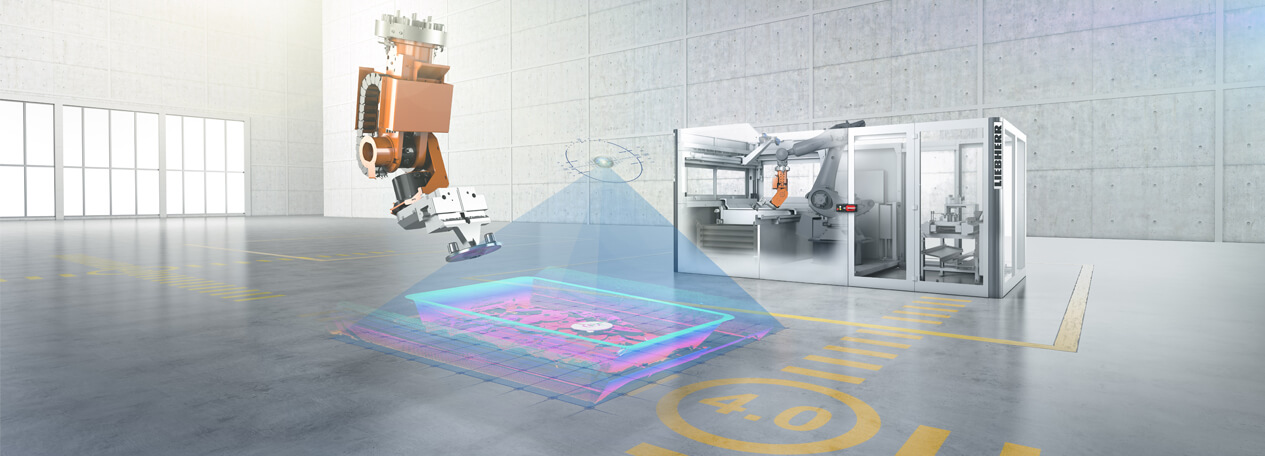
The automation at the beginning and end of a line depends on how the workpieces are fed and stored. If the delivery involves removing a single layer of goods from a pallet; contour or feature recognition is sufficient for enabling automated gripping and transfer. If the workpieces are in several layers, such as stacked blister packs or tablet packages, the robot requires a 2½D or 3D system. In the former case, the third dimension is extrapolated using contour distances or gray-scale values. For a real 3D process, the system measures using points in space.
The same is true of positioning. The more accurately the workpiece has to be placed, the more demanding the requirements put on the vision system. Placement on a conveyor belt is simple; positioning within a machine tool is challenging. The more flexibility required for loading and unloading a workpiece (into and out of the machine), the more complex the system. There are also rules of conduct, such as detecting and handling missing or incorrect parts, and collision models. Liebherr automation systems have a response for these various challenges.