
机械手视觉技术包 - LHRobotics.Vision
注重细节
工艺包
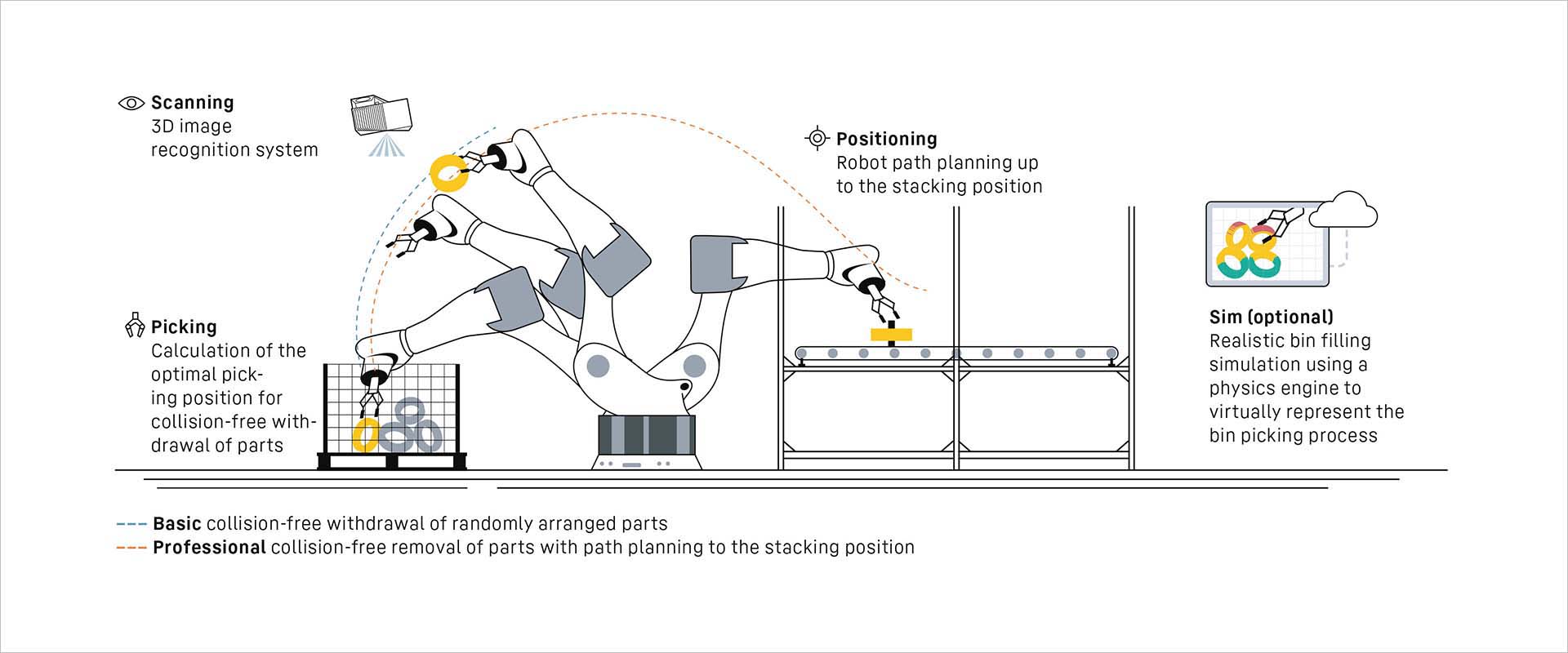
该工艺包包括 LHRobotics.Vision 软件,可实现精确的物体识别和选择以及无碰撞零件移除。并且,该软件还可以接管机械手路径规划直至存储点。此外,该应用还需要基于投影仪的视觉系统。
基于投影仪的视觉系统,针对每种应用情况都具有不同的图像场变体
软件
基础许可证
更具成本效益的基础许可证包括工件的检查及其无碰撞抓取。该版本非常适合存储位置和相关路径规划不应由 LHRobotics.Vision 软件接管的应用。碰撞检查仅限于夹具模型,而该版本不考虑机械手的干扰轮廓。这使得该变体特别适合扁平的箱子或需要深入箱子的大型夹具。
通过基础许可证,LHRobotics.Vision 可以在简化版本中运行。基础许可证不包括以下功能:
- 创建存储点以及存储路径规划
- 插入障碍物
- 插入机械手模型
专业许可证
专业许可证提供 LHRobotics.Vision 软件的全部功能。除了基础许可证的功能外,该版本还提供以下功能:
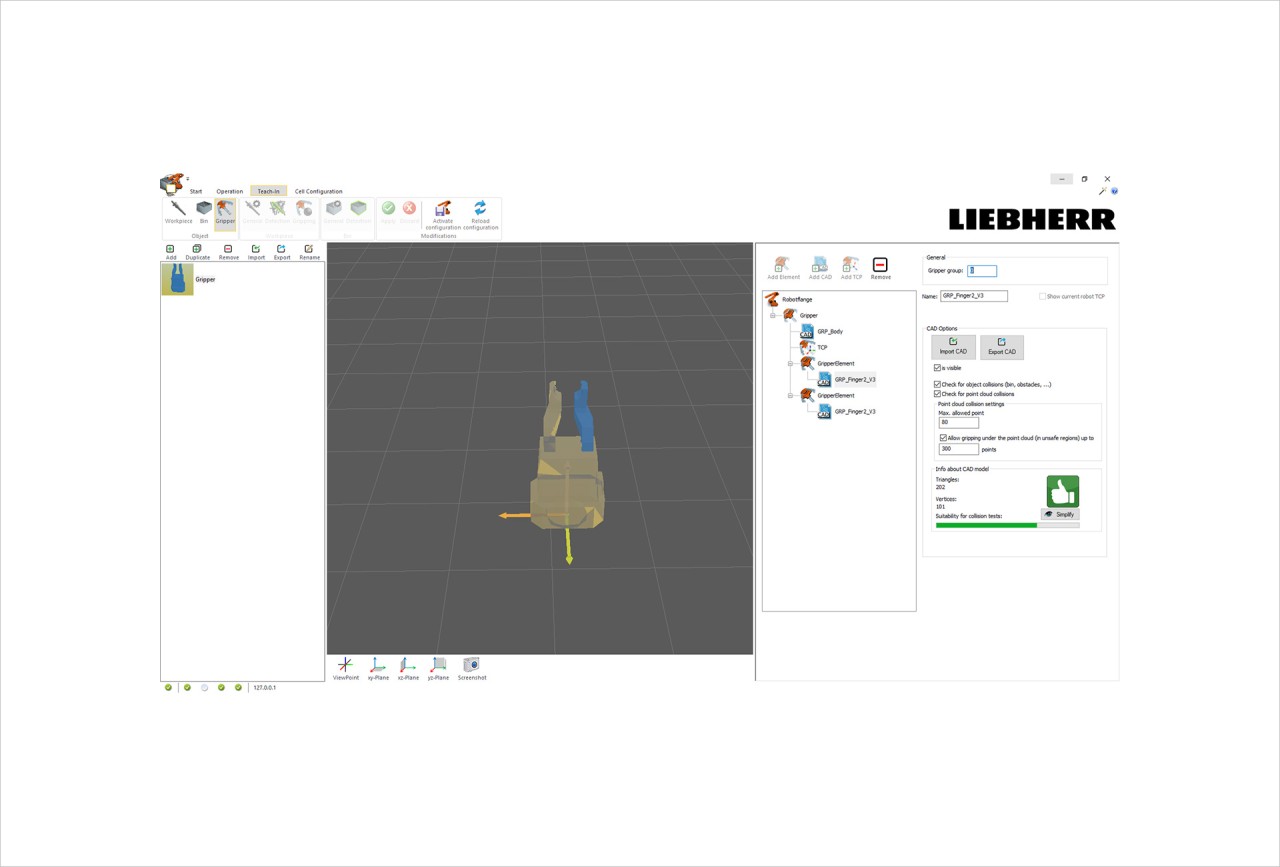
- 创建用于碰撞检查的机械手模型
- 创建存储点
- 到达存储点的路径规划
- 在路径规划期间插入整个单元环境以进行碰撞检查
该版本特别适用于抓取工件的存储位置对于工艺流程非常重要的应用情况。
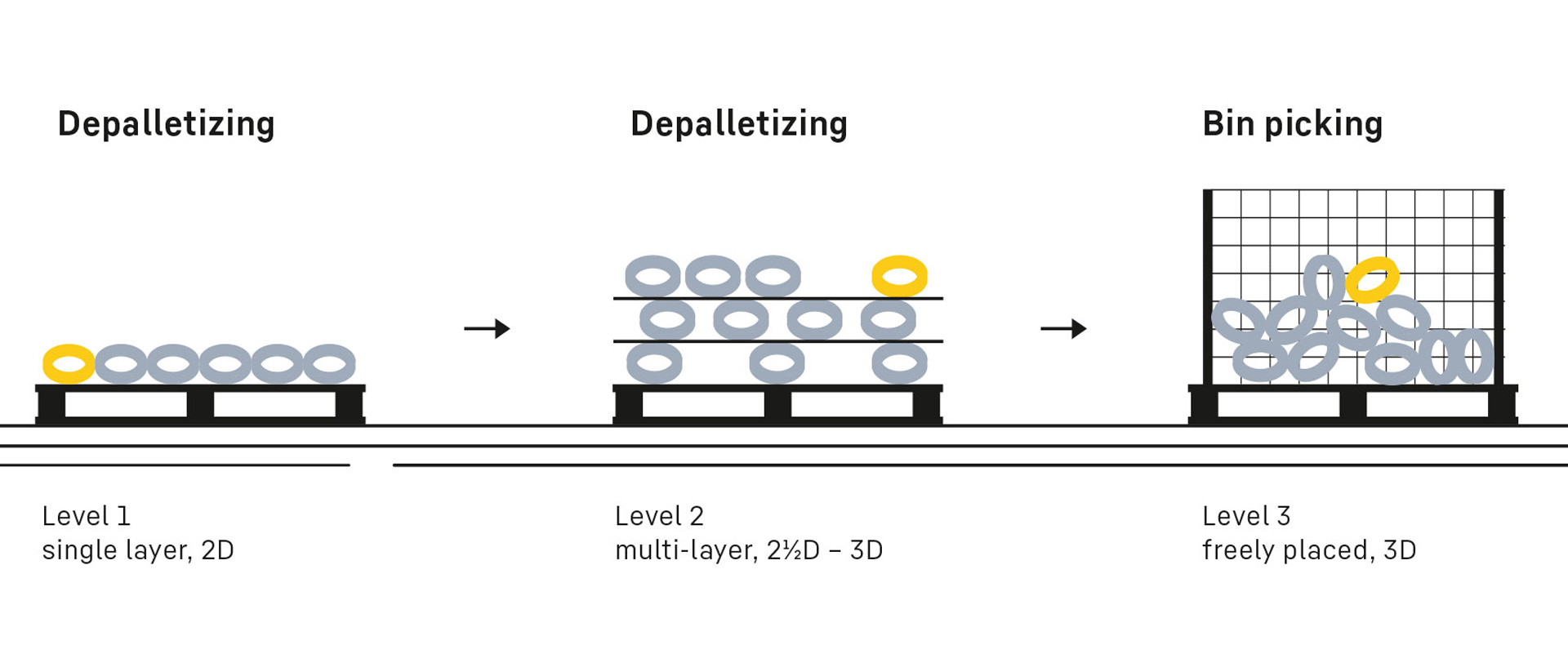
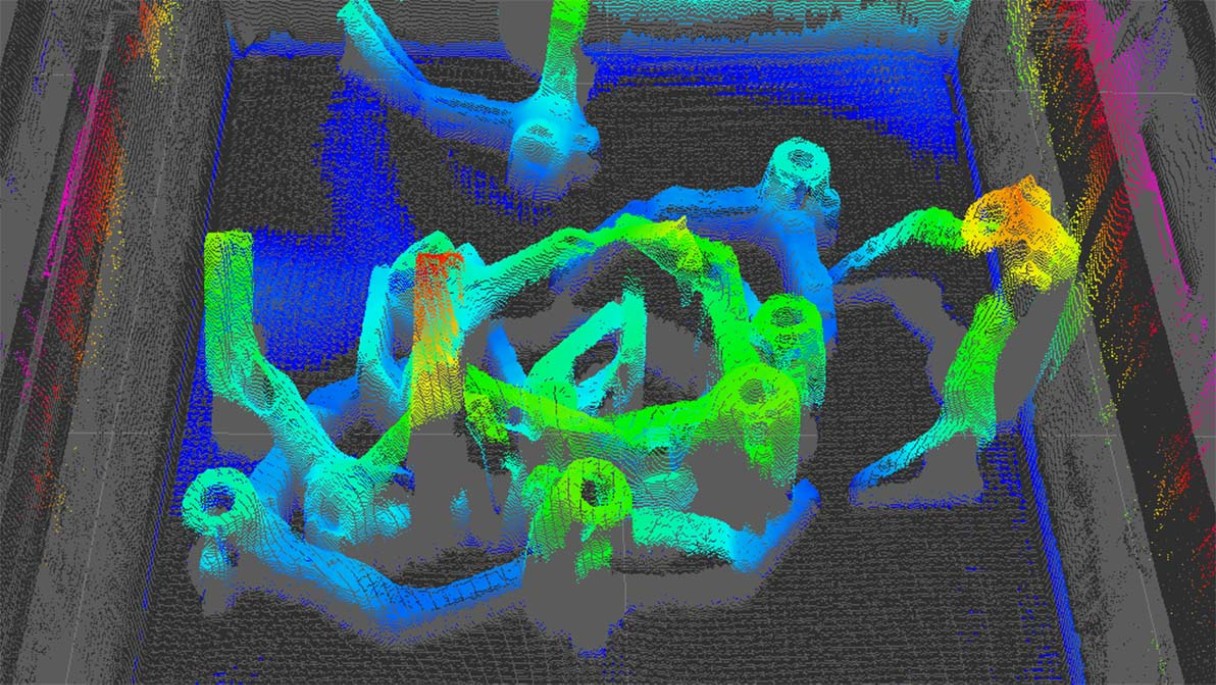
智能的随机容器内取物软件
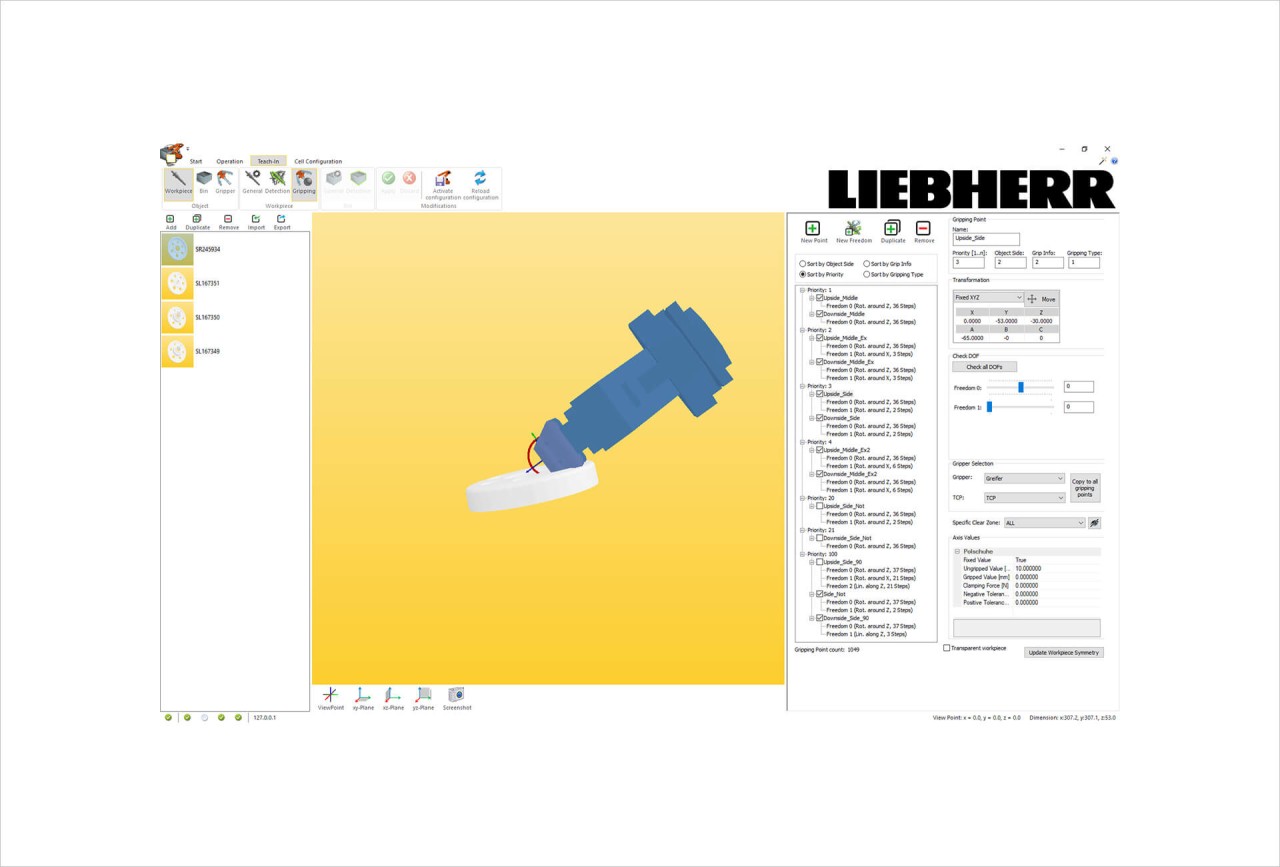
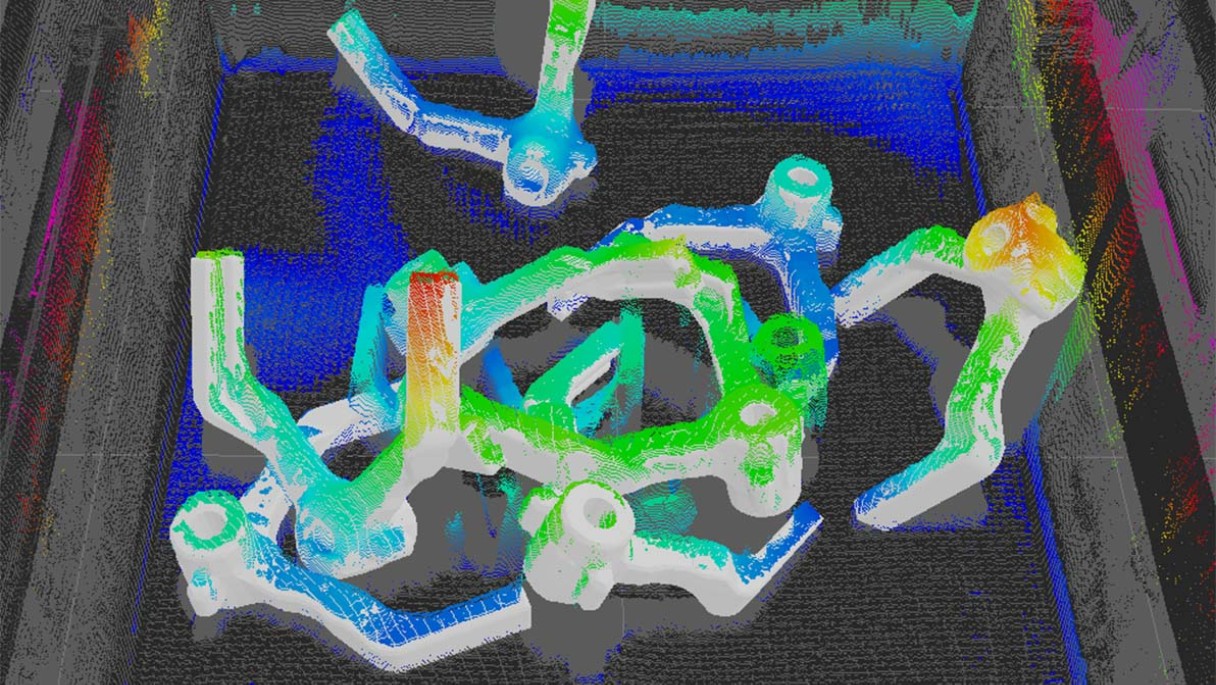
逐步获得正确的抓取
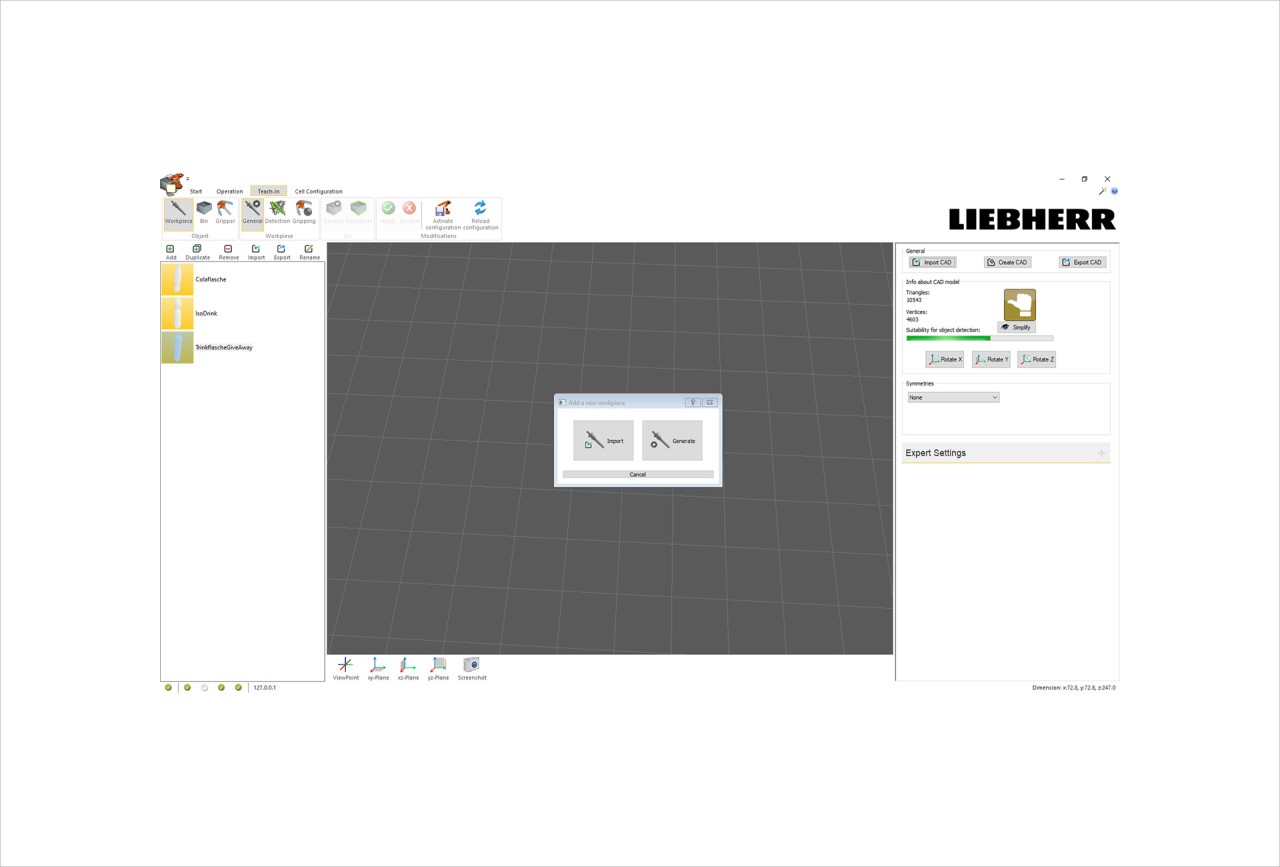
夹具与工件的融合
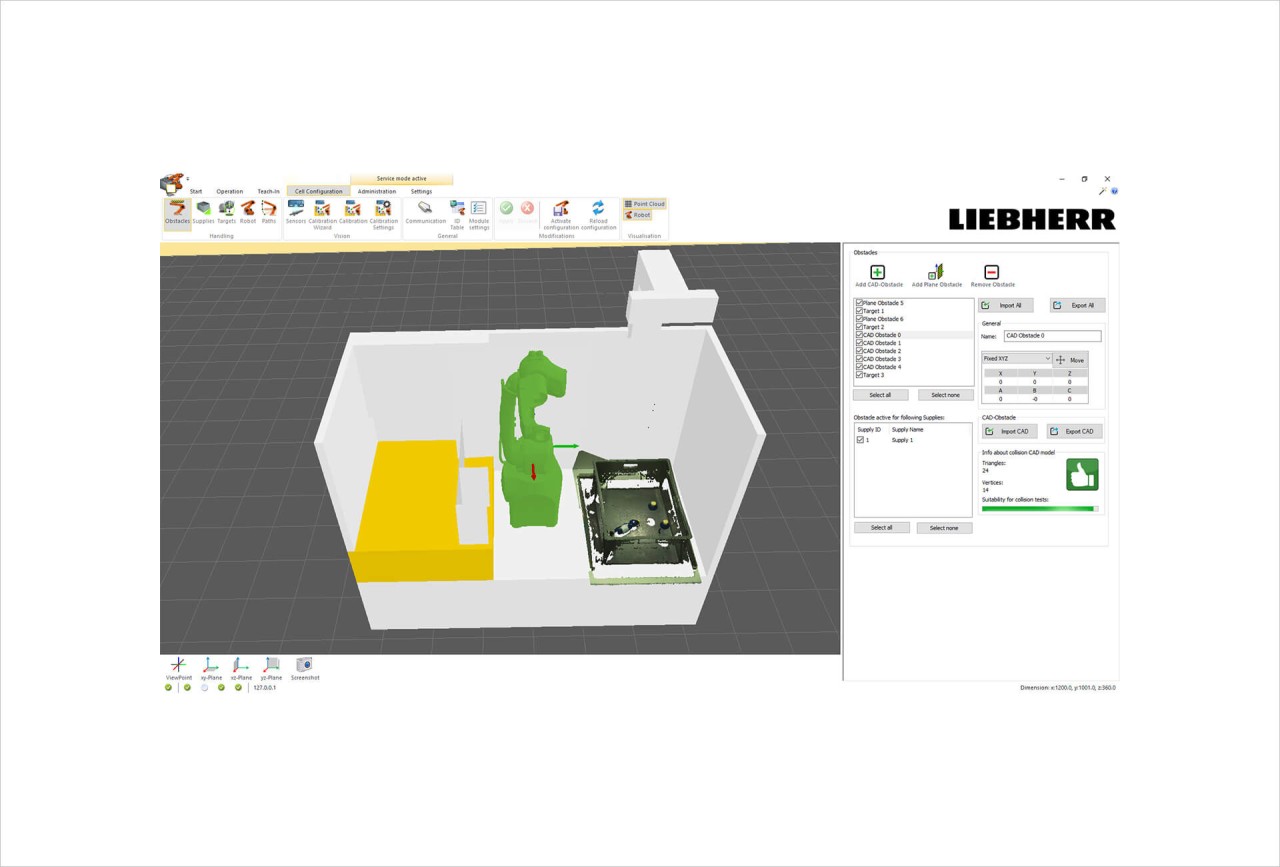
密切关注周围环境
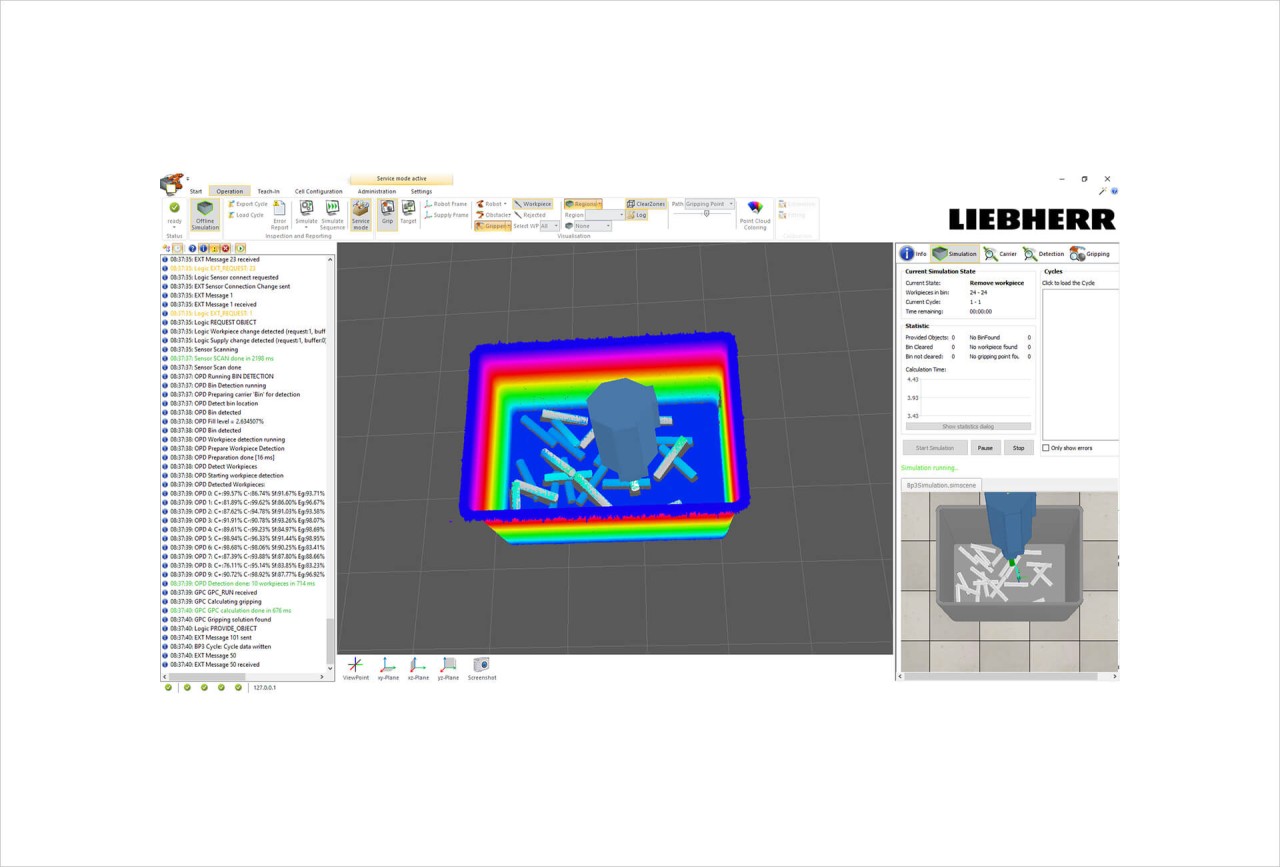
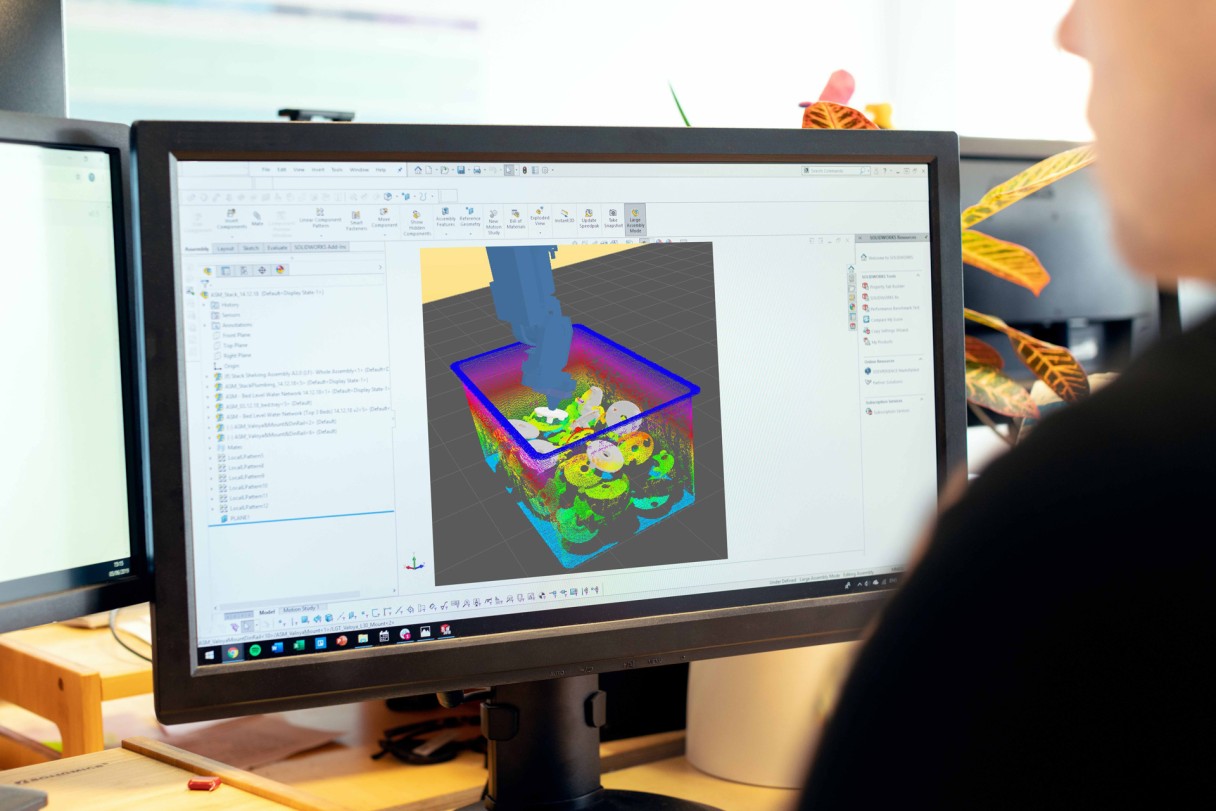
使用 LHRobotics.Vision Sim 集成的模拟选项
人工智能为黑暗带来光明
从 3.4 版本开始,AI 支持了检测参数的优化。
操作员创建点云并通过在点云中手动定位真实工件来对其进行分类。由此显示了软件应在哪些区域搜索工件。然后软件自动执行多次扫描并独立调整检测参数。在多次迭代中,软件确定了识别工件的最佳设置。
通过人工智能支持的点云分割优化工件检测
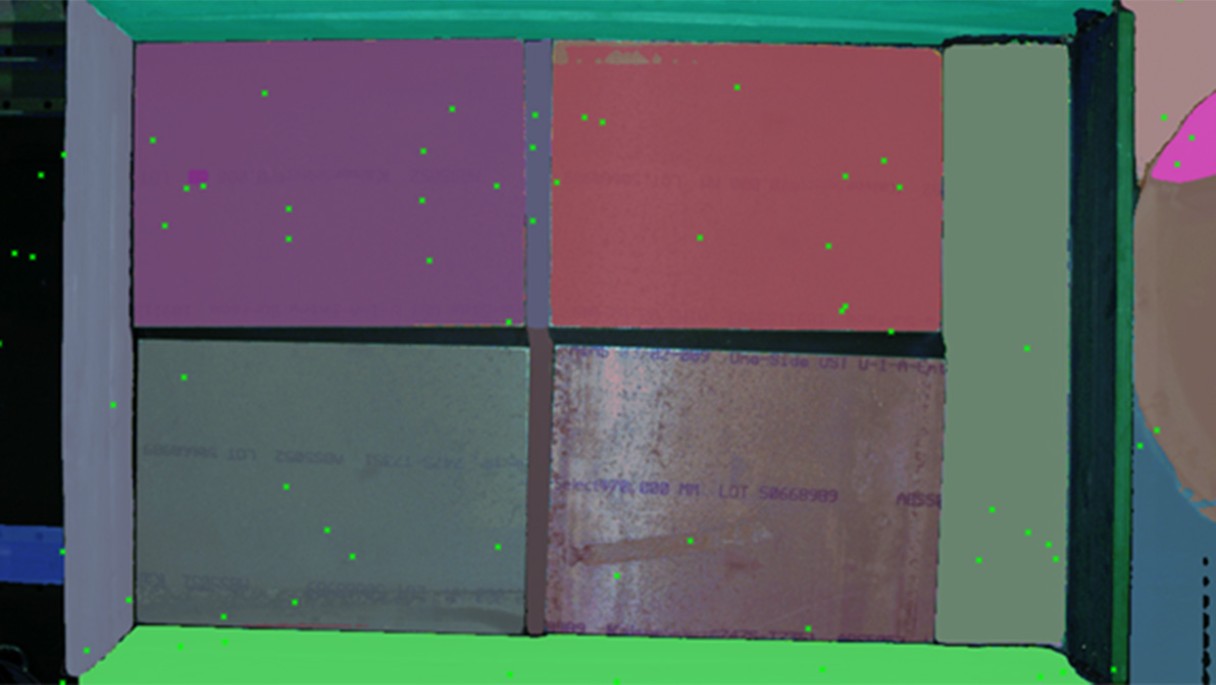
为了更快、更精确地识别工件,Liebherr 还利用人工智能支持对点云进行分割。在将工件与点云进行比较之前,使用人工智能将其分为子段。然后,LHRobotics.Vision 软件仅搜索定义区域中的工件。与工件无关的部分(例如盒子的侧壁和底部)将从点云中删除并忽略。

适合每种应用的相机

细节拍摄的最佳定位:夹具上带有传感器的臂上应用

全面观察的传感器
Liebherr - LHRobotics.Vision - 如何通过 4 个步骤实现随机容器内取物
您的机械手视觉工艺包联系人
我们很乐意回答您有关机械手视觉应用的问题。
Jürgen Groß
电池和柔性制造系统、自动化系统、电动汽车销售经理
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
德国
电话:+49 170 950 09 89
电子邮箱
有关我们视觉系统的更多信息
请阅读我们的客户杂志和新闻稿中的精彩文章



