
ロボットビジョンテクノロジーパッケージ - LHRobotics.Vision
細部へのこだわり
テクノロジーパッケージ
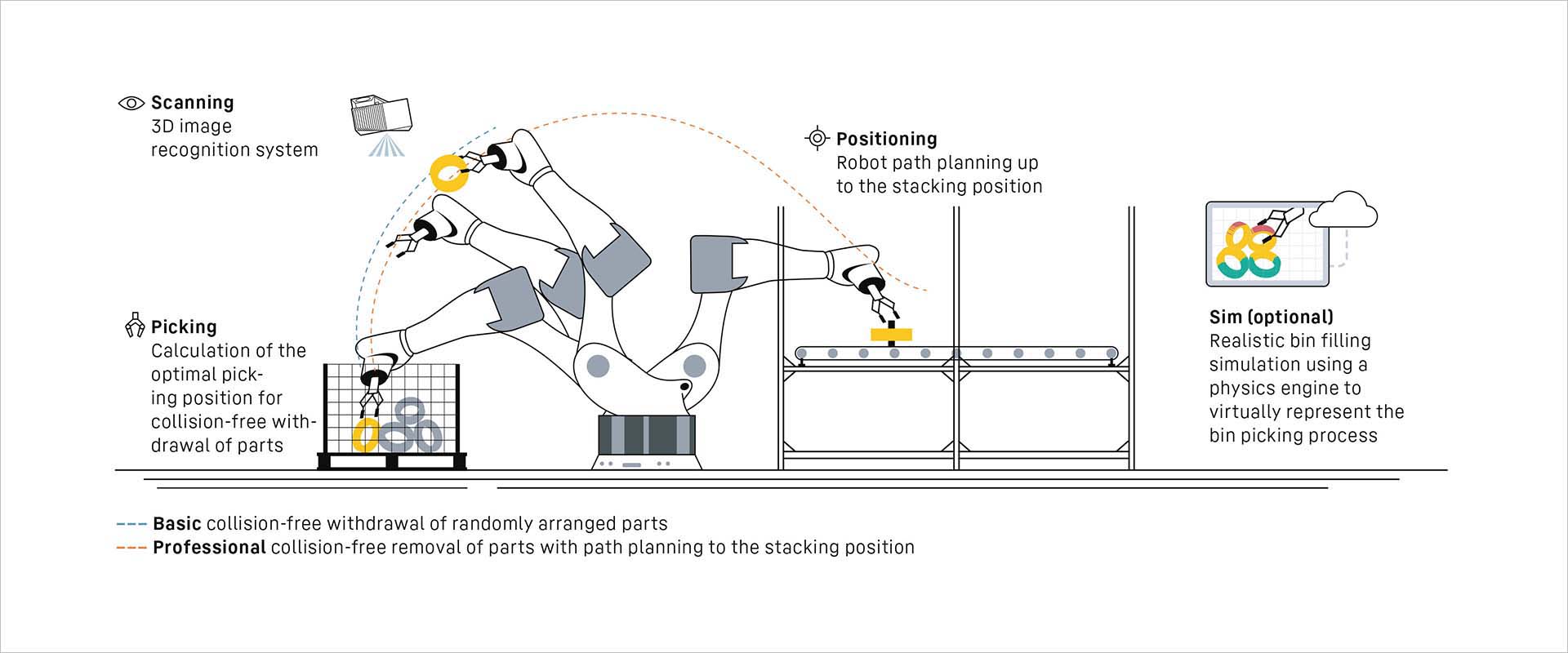
このテクノロジーパッケージには、正確な対象識別、対象選択、そして衝突を起こさず部品の取り出しを実現するLHRobotics.Visionソフトウェアが含まれています。また、搬送先までのロボットのパスプランニングもオプションで用意しています。アプリケーションには追加でプロジェクターベースのビジョンシステムが必要となります。
各用途に応じて異なる画像分野のバリエーションを持つプロジェクターベースのビジョンシステム
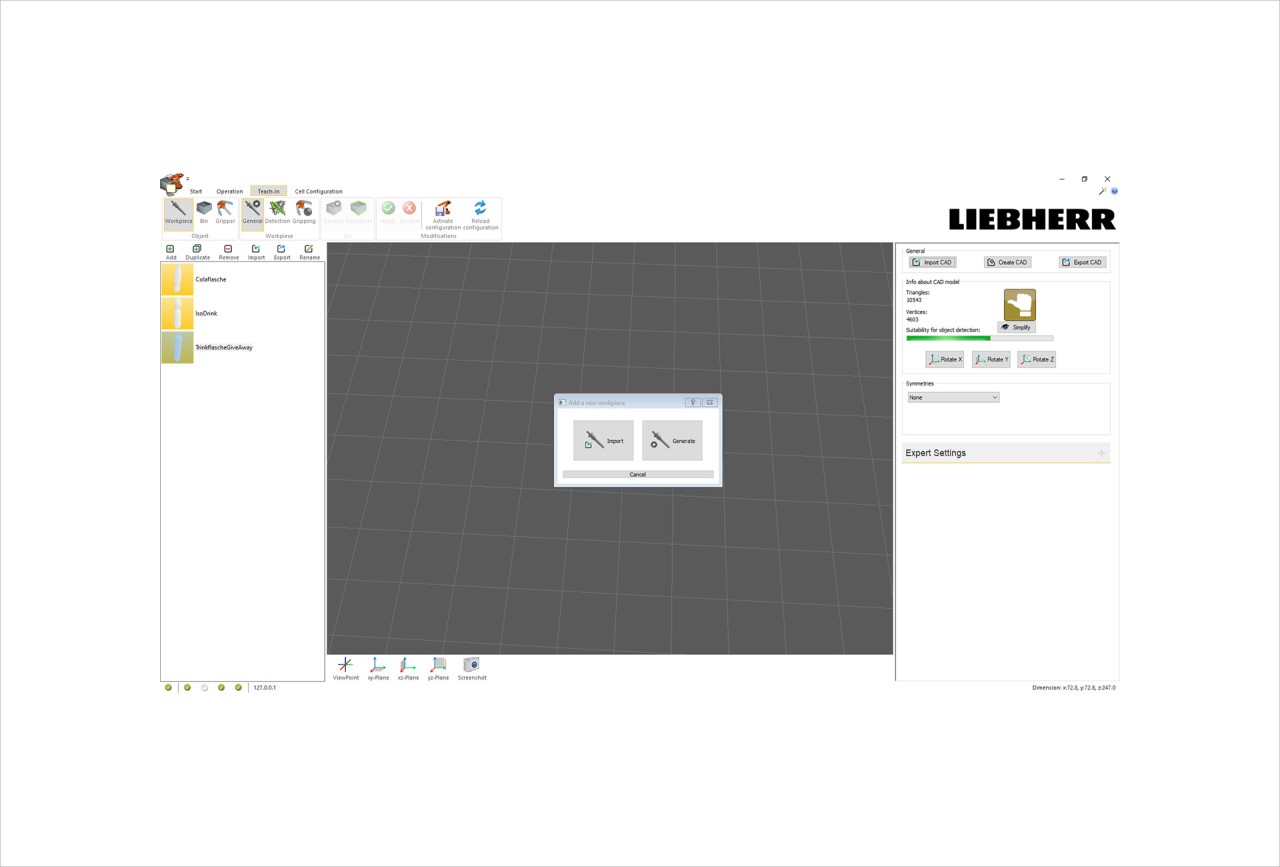
ソフトウェア
ベーシックライセンス
低価格のベーシックライセンスには、ワーク検知と衝突を起こさない部品の取り出しが含まれます。これは、格納位置とそこに至るパスプランニングをLHRobotics.Visionソフトウェアに引き継ぐ必要のないアプリケーションに理想的なライセンスバージョンです。このバージョンでは、衝突検知はグリッパー使用に限定されていますが、ロボットの干渉形状は考慮されていません。そのため、このライセンスは特に平らな箱や箱の奥深くまで届く大型のグリッパーに適しています。
ベーシックライセンスではLHRobotics.Visionの低スペックバージョンを稼働させることができます。以下の機能はベーシックライセンスには含まれません:
- 格納ポイントの作成、および格納のパスプランニング
- 障害物の追加
- ロボットモデルの追加
プロライセンス
プロライセンスでは、LHRobotics.Visionソフトウェアの機能を無制限にご使用いただけます。このバージョンでは、ベーシックライセンスの機能の他、以下の機能を追加でご利用いただけます:
- 衝突検知用ロボットモデルの作成
- 格納ポイントの作成
- 格納ポイントまでのパスプランニング
- パスプランニングにおける衝突検知用セル環境全体の追加
このバージョンは、処理工程において取り出したワークの格納位置が重要なアプリケーションに特に適しています。
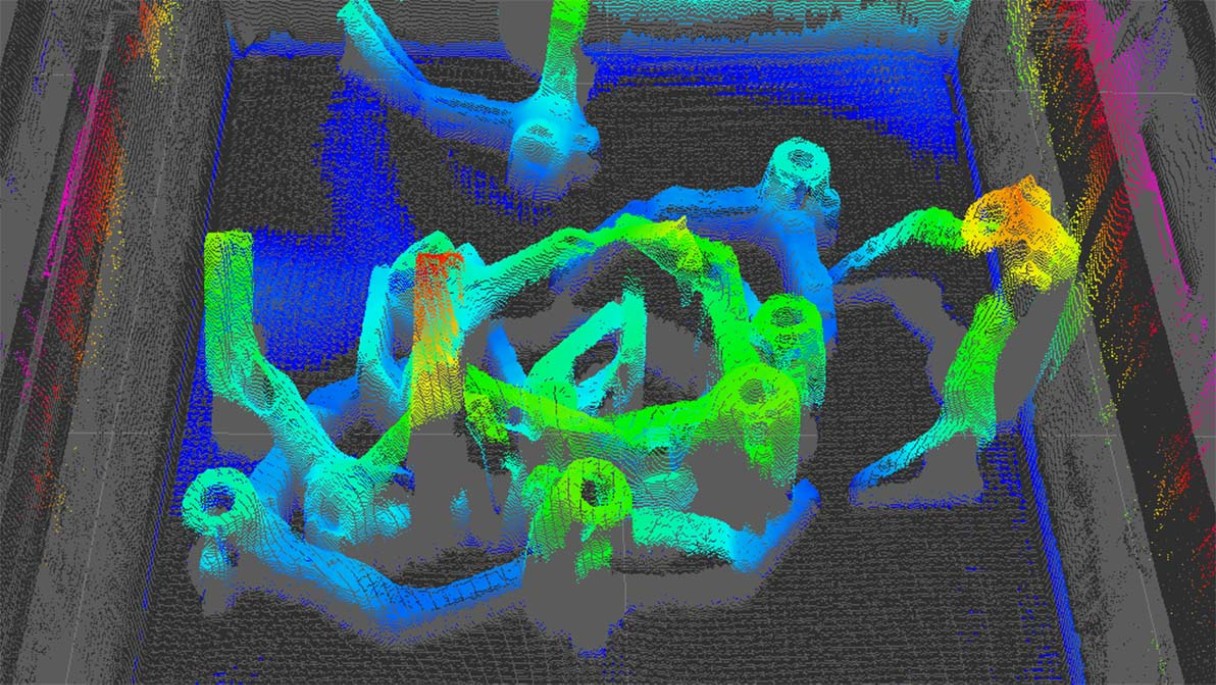
スマートなビンピッキングソフトウェア
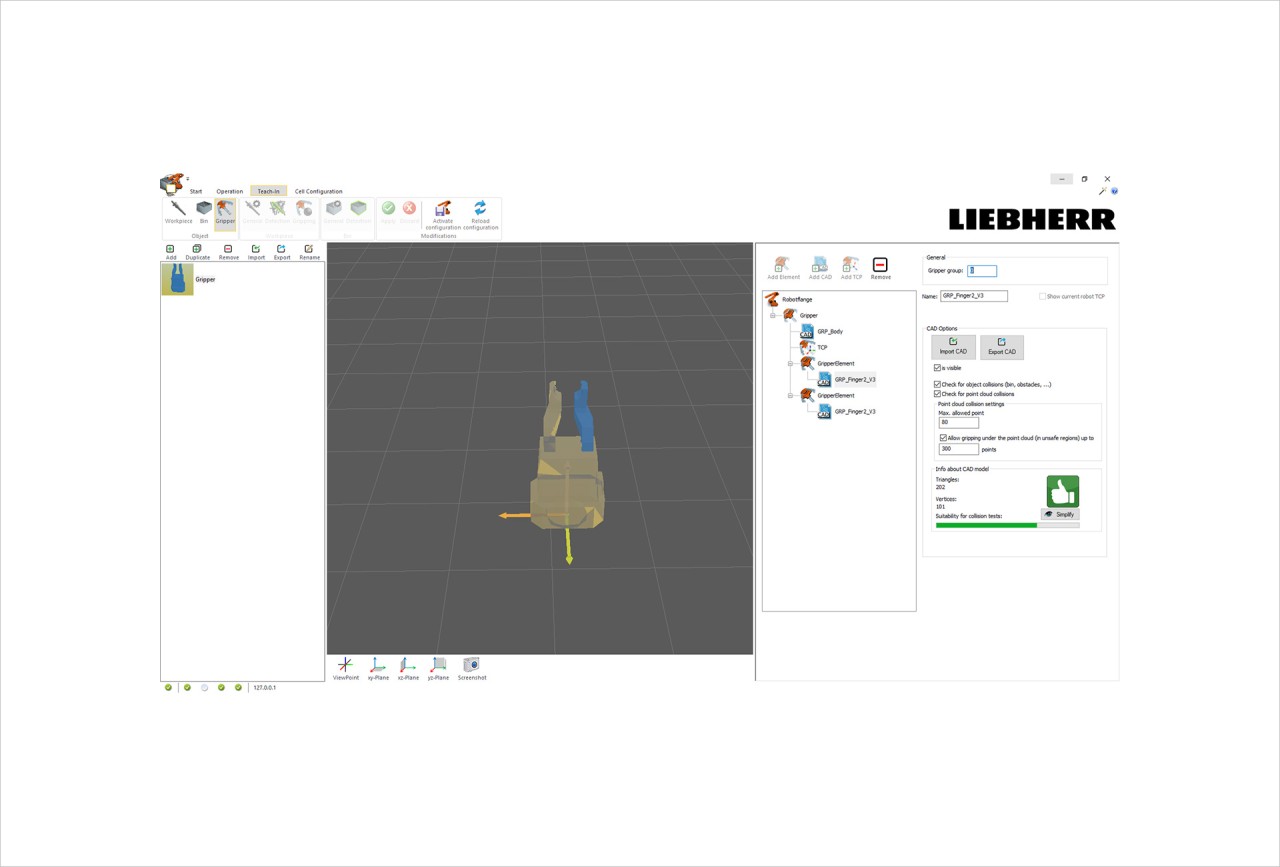
ステップバイステップで最適なピッキングを実現
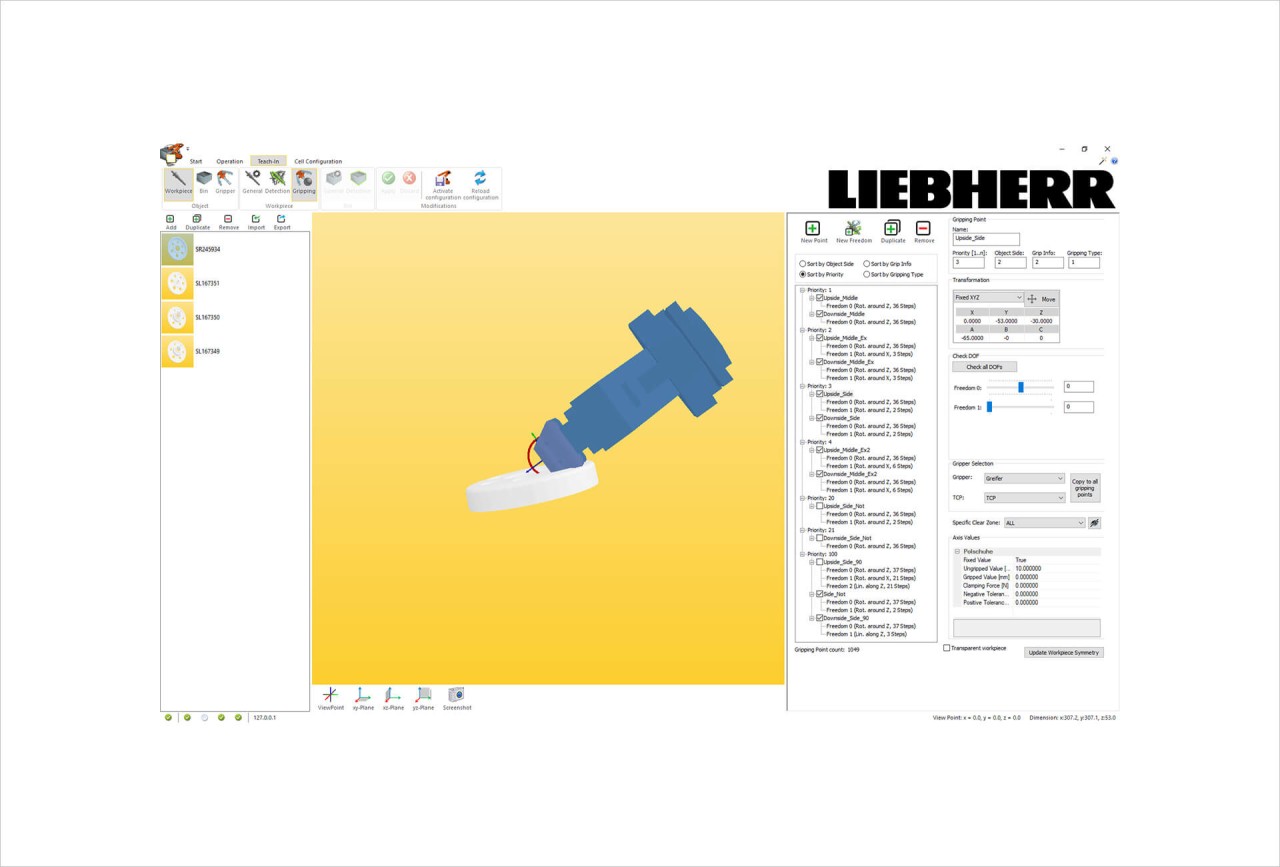
グリッパーとワークの接触
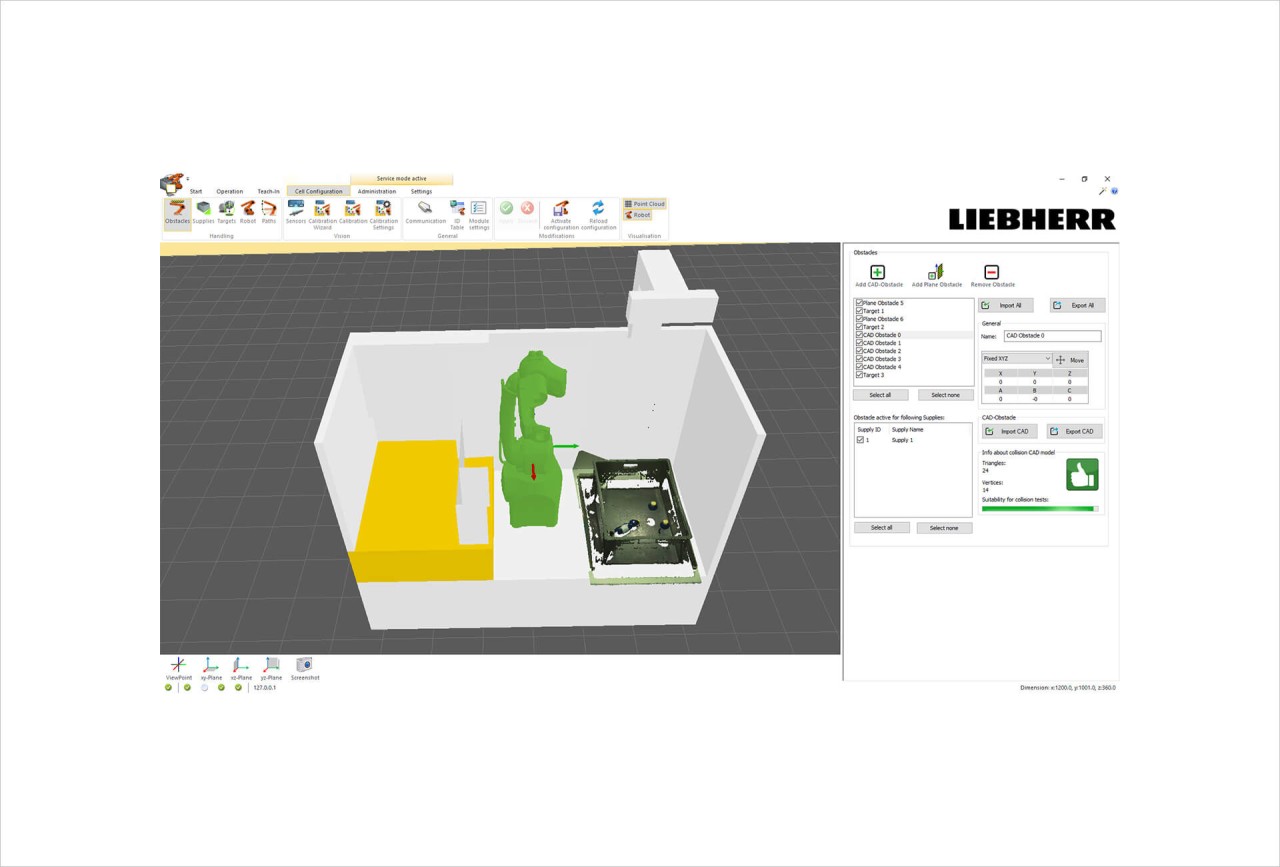
周辺を監視
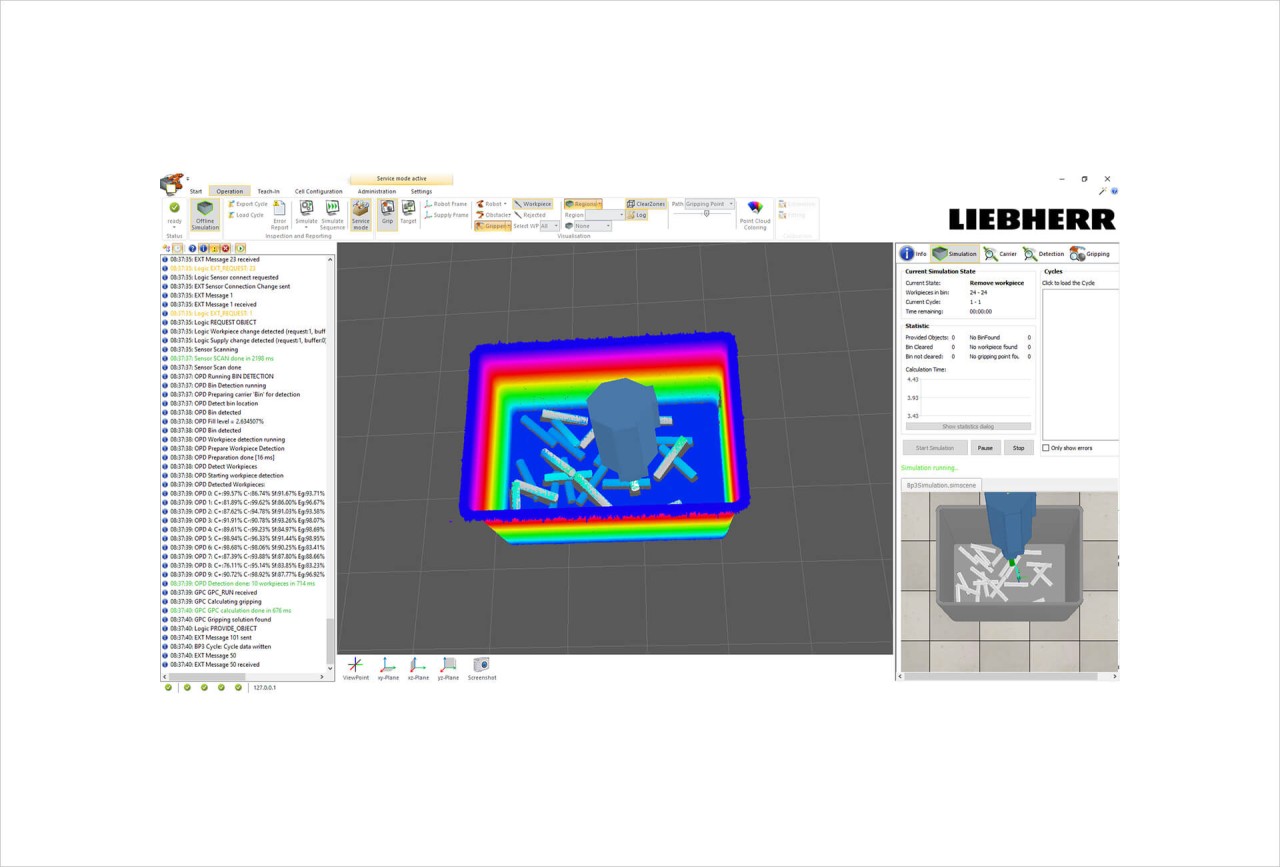
LHRobotics.Vision Simを使った統合シミュレーションオプション
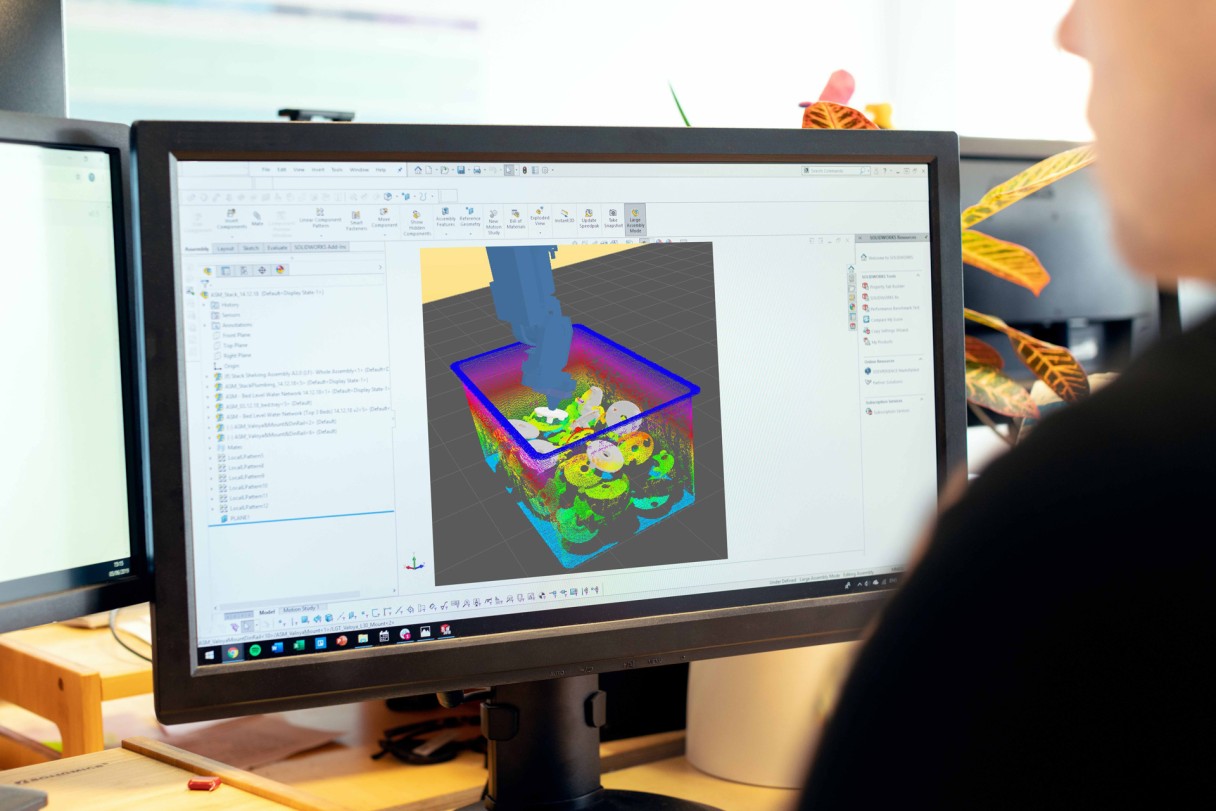
人工知能が闇に光をもたらします
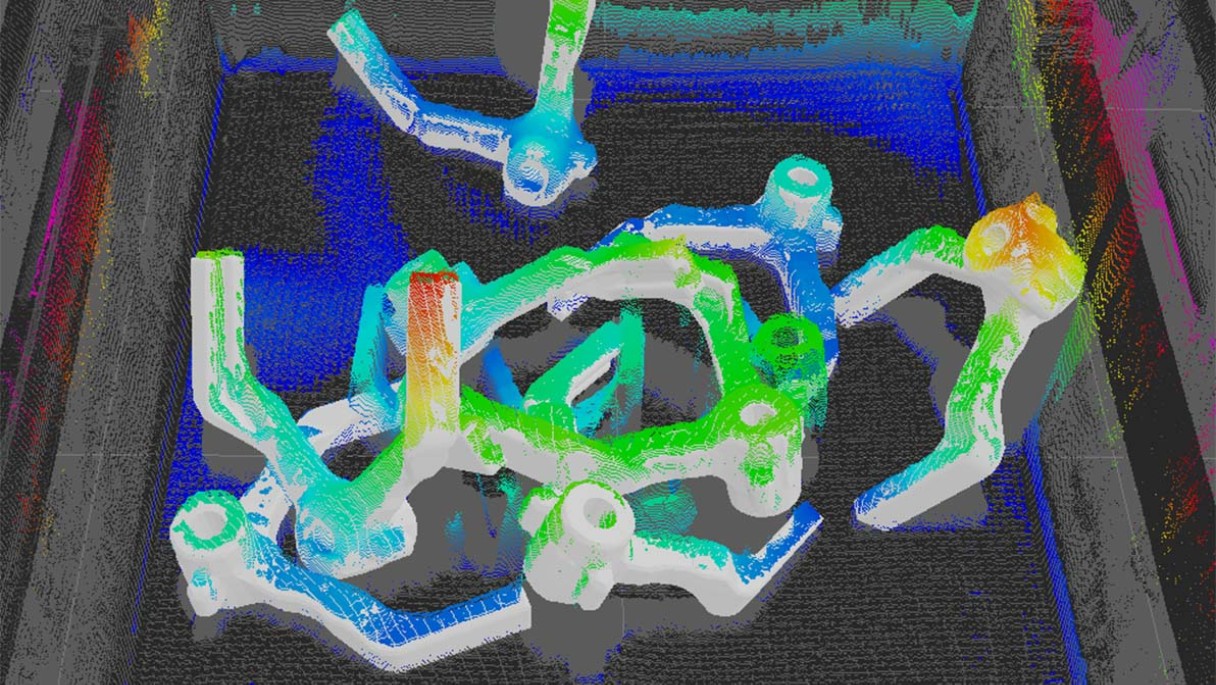
バージョン3.4以降、検出パラメーターの最適化がAIによって支援されています。
これを可能にするためにオペレーターは点群を作成し、その中に実際のワークを手動で配置することによって点群を分類していきます。これによってどの領域でワークを探すべきなのかがソフトウェアに表示されます。その後、ソフトウェアは自動的に複数のスキャンを実施し、検出パラメーターを個別に調整していきます。これを繰り返すことによって、ソフトウェアはワーク検出の最適設定を決定できます。
AIを活用した点群セグメンテーションによるワーク検出の最適化
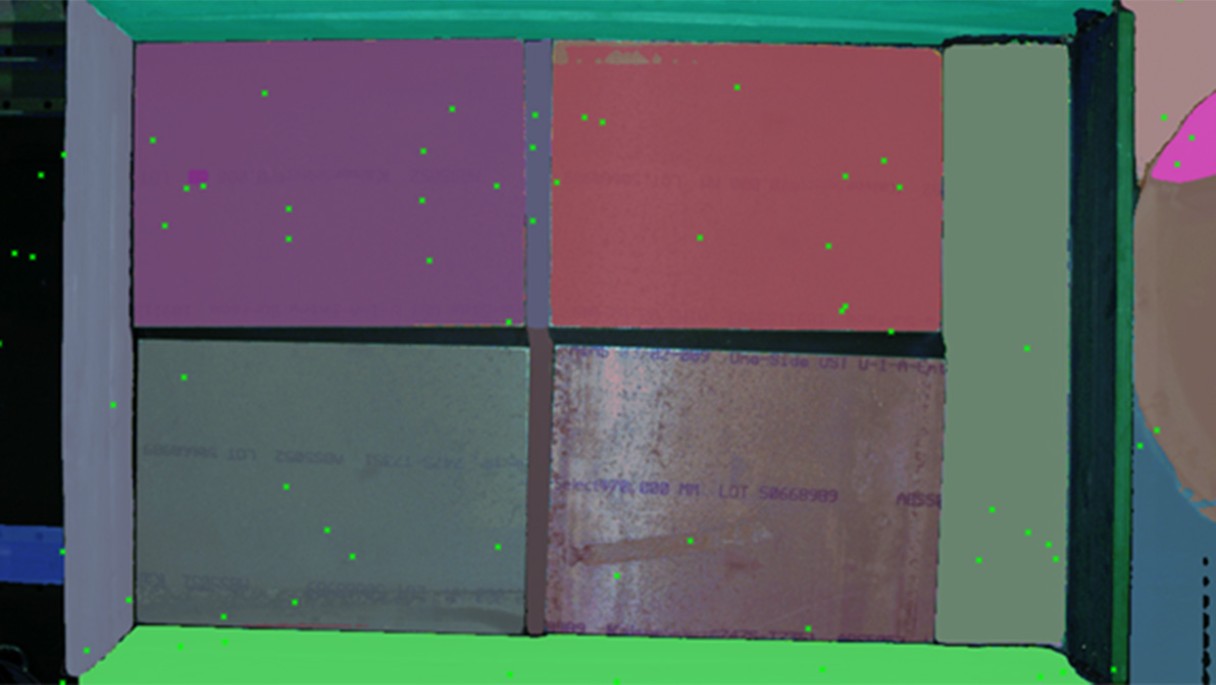
ワークを迅速かつ正確に検出するために、リープヘルは点群セグメンテーションにおいてもAIによる支援を利用しています。ワークは、点群と比較する前にAIを使ってサブセグメントに分割されます。その後、LHRobotics.Visionソフトウェアは定義された領域のワークだけを探します。箱の側面や床などワークに割り当てられていないセグメントは、点群から削除され、検出の対象から外されます。

個々のアプリケーションに適したカメラ

細かい検出を行う上で最適な配置:グリッパーにセンサーを備えたオンアームアプリケーション

センサーの概要
Liebherr - LHRobotics.Vision - 4つのステップでビンピッキングを導入する方法
ロボットビジョンテクノロジーパッケージに関するお問い合せ先
ロボットビジョンアプリケーションに関するご質問に喜んでお答えします。
Jürgen Groß
セル & フレキシブル製造システム、オートメーションシステム、Eモビリティ部門販売責任者
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
ドイツ
Tel.: +49 170 950 09 89
Eメール
ビジョンシステムに関する詳細情報
当社のカスタマーマガジンおよびプレスリリースの興味深い記事をご覧ください



